Chris Řekl,
06 Aug 2018
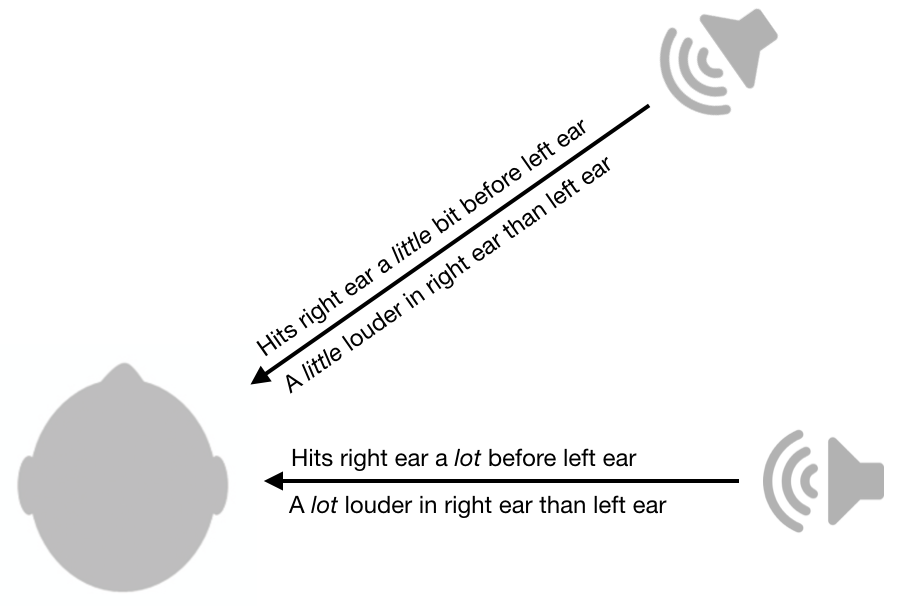
Jedna z nejlepších věcí, co jsem se kdy naučil o smyslové fyziologie je to, jak sluchový systém je schopen lokalizovat zvuky. K určení, zda zvuk přichází zprava nebo zleva, mozek používá rozdíly mezi ušima v amplitudě a načasování. Jak je znázorněno na obrázku níže, pokud je zvuk hlasitější v pravém uchu ve srovnání s levým uchem, pravděpodobně přichází z pravé strany. Čím menší je tento rozdíl, tím blíže je zvuk ke středové čáře (i.e svislá rovina směřující zepředu dozadu). Podobně, pokud zvuk dorazí k pravému uchu před levým uchem, pravděpodobně přichází zprava. Čím menší je časový rozdíl, tím blíže je středová čára. Je za tím fascinující literatura o nervových mechanismech.
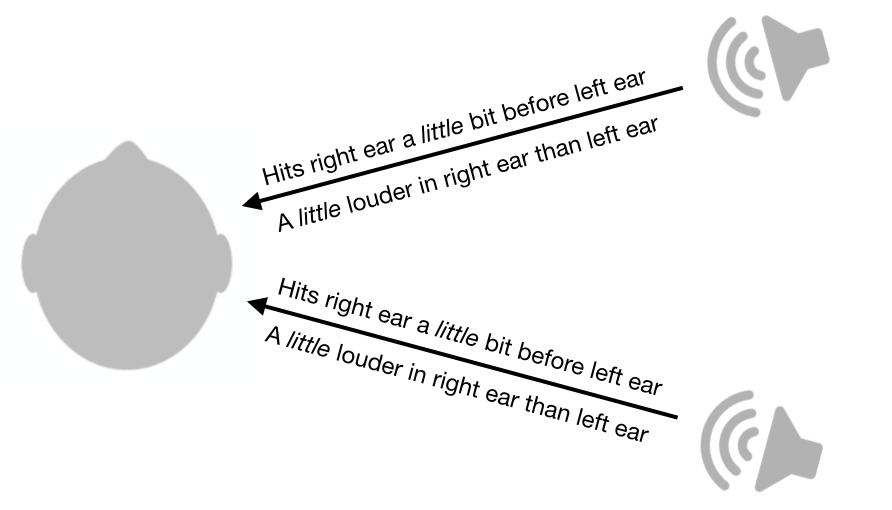
Inter-ucho hlasitost a časové rozdíly jsou docela užitečné, ale, bohužel, oni ještě nechat hodně nejasností. Například, zvuk z přední pravý bude mít stejnou hlasitost rozdíly a časové rozdíly jako zvuk z vašeho zpátky.
nejen, že tento systém opustit nejasnosti mezi přední a zadní straně, to také listy nejasnosti mezi horní a dolů. Ve skutečnosti existuje celý kužel zmatku, který tento systém nemůže disambiguovat. Zvuk ze všech bodů podél povrchu kužele bude mít stejné rozdíly v hlasitosti mezi ušima a rozdíly v načasování.
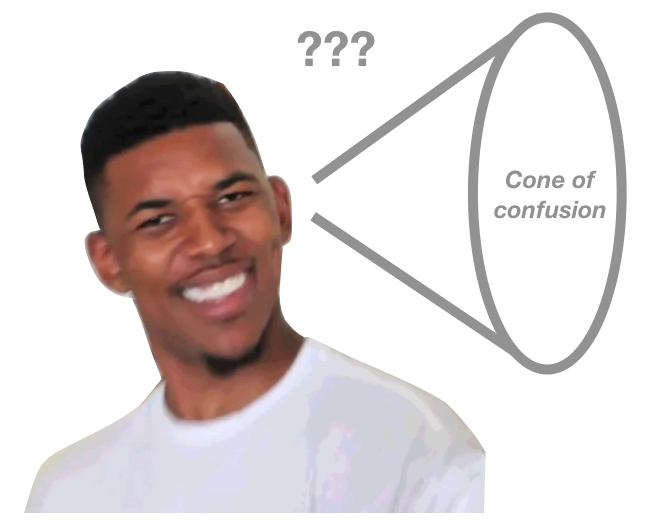
Zatímco tento systém zanechává kužel zmatek, lidé jsou stále schopni určit polohu zvuky z různých míst na kužel, alespoň do určité míry. Jak jsme schopni to udělat?
překvapivě jsme schopni to udělat kvůli tvaru našich uší a hlav. Když zvuk prochází našimi ušima a hlavou, určité frekvence jsou oslabeny více než jiné. Kriticky je vzorec útlumu velmi závislý na směru zvuku.
tento vzor útlumu závislý na poloze se nazývá přenosová funkce související s hlavou (HRTF)a teoreticky by to mohlo být použito k disambiguaci míst podél kužele zmatku. Příklad něčího HRTF je uveden níže, s frekvencí na vodorovné ose a polárním úhlem na svislé ose. Teplejší barvy představují menší útlum (tj. Pokud vám vaše hlava a uši daly tento HRTF, můžete se rozhodnout, že zvuk přichází zepředu, pokud má vyšší vysokofrekvenční výkon, než byste očekávali.
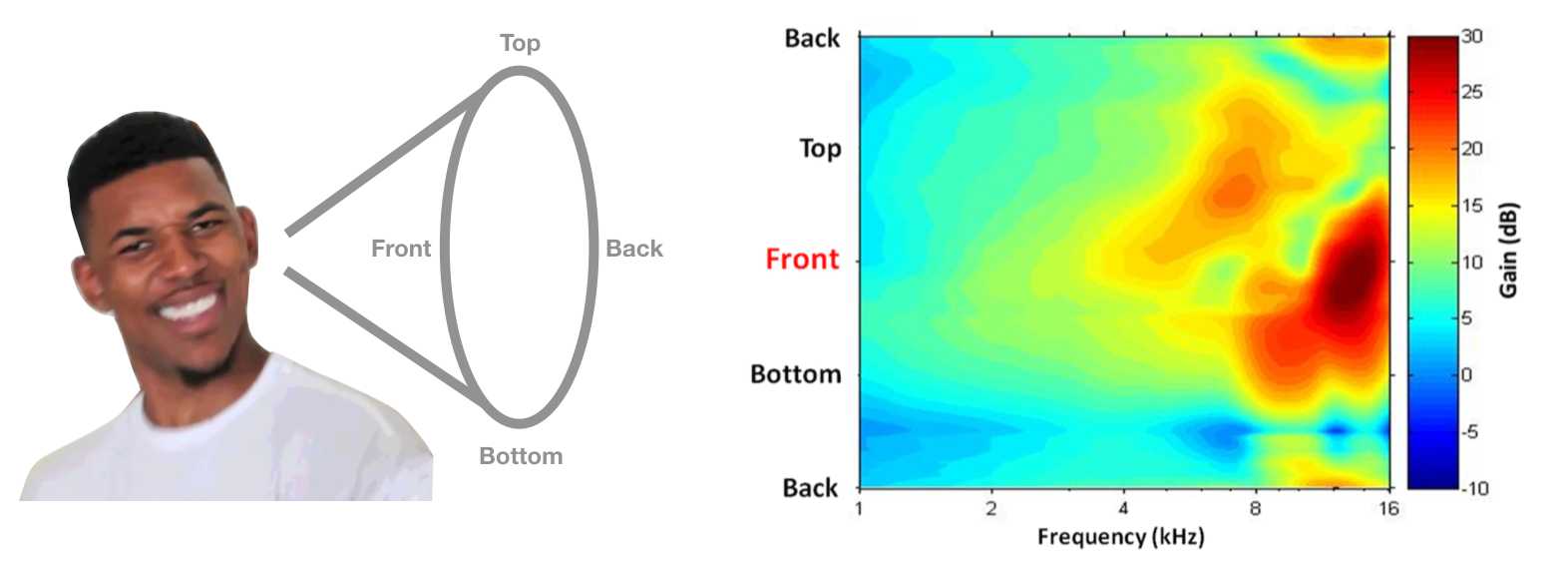
HRTF obrázek z kapitoly psychoakustiky Simona Carlileho v příručce Sonifikace.
tento systém zní teoreticky dobře, ale skutečně používáme tyto podněty v praxi? V roce 1988, Frederic Wightman a Doris Kistler provádí geniální sadu experimentů (1, 2) ukazují, že lidé opravdu používají HRTFs odvodit umístění. Nejprve změřili HRTF každého účastníka vložením malého mikrofonu do uší a přehráváním zvuků z různých míst. Dále vytvořili digitální filtr pro každé místo a každého účastníka. To znamená, že tyto filtry implementovaly HRTF každého účastníka. Nakonec umístili sluchátka na posluchače a přehrávali jim zvuky, pokaždé, když zvuk procházeli jedním z digitálních filtrů. Překvapivě, účastníci byli schopni správně odhadnout “umístění” zvuku, v závislosti na které byl použit filtr, i přesto, že zvuk přichází ze sluchátek. Byli také mnohem lepší v lokalizaci zvuku při použití vlastního HRTF, spíše než HRTF někoho jiného.
další důkazy pro tuto hypotézu pocházejí od Hofmana a kol., 1998, který ukázal, že použitím tmelu k přetvoření uší lidí dokázali změnit HRTFs a narušit tak lokalizaci zvuku. Zajímavé je, že se lidé mohli rychle naučit, jak lokalizovat zvuk pomocí svých nových HRTF.
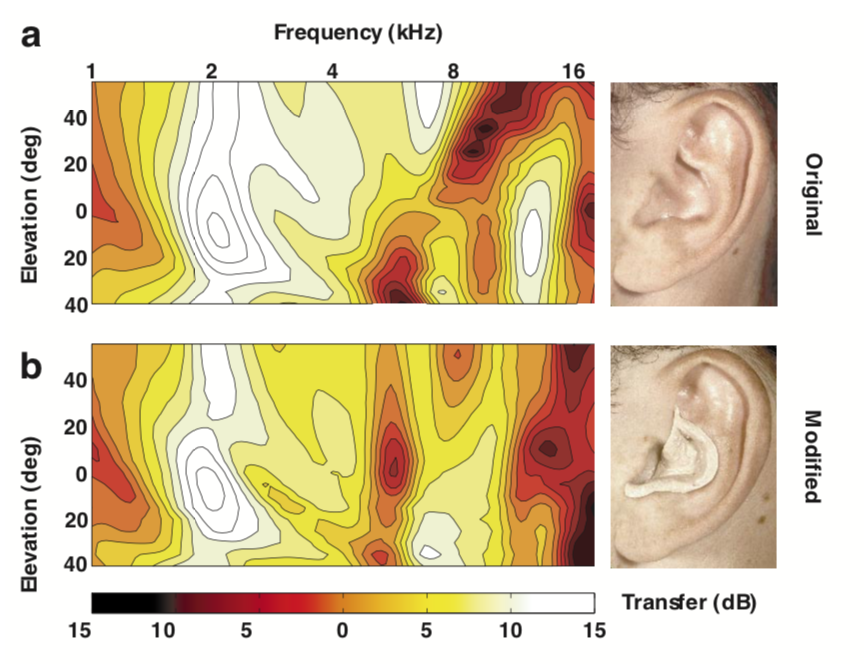
Obrázek od Hofmana a kol., 1998
poslední zábavný fakt: pro zlepšení zvukové lokalizace humanoidních robotů, výzkumníci v Japonsku připojené umělé uši do hlavy robota a provedeny některé sofistikované algoritmy pro odvození zvuk umístění. Zde jsou některé obrázky robotů.
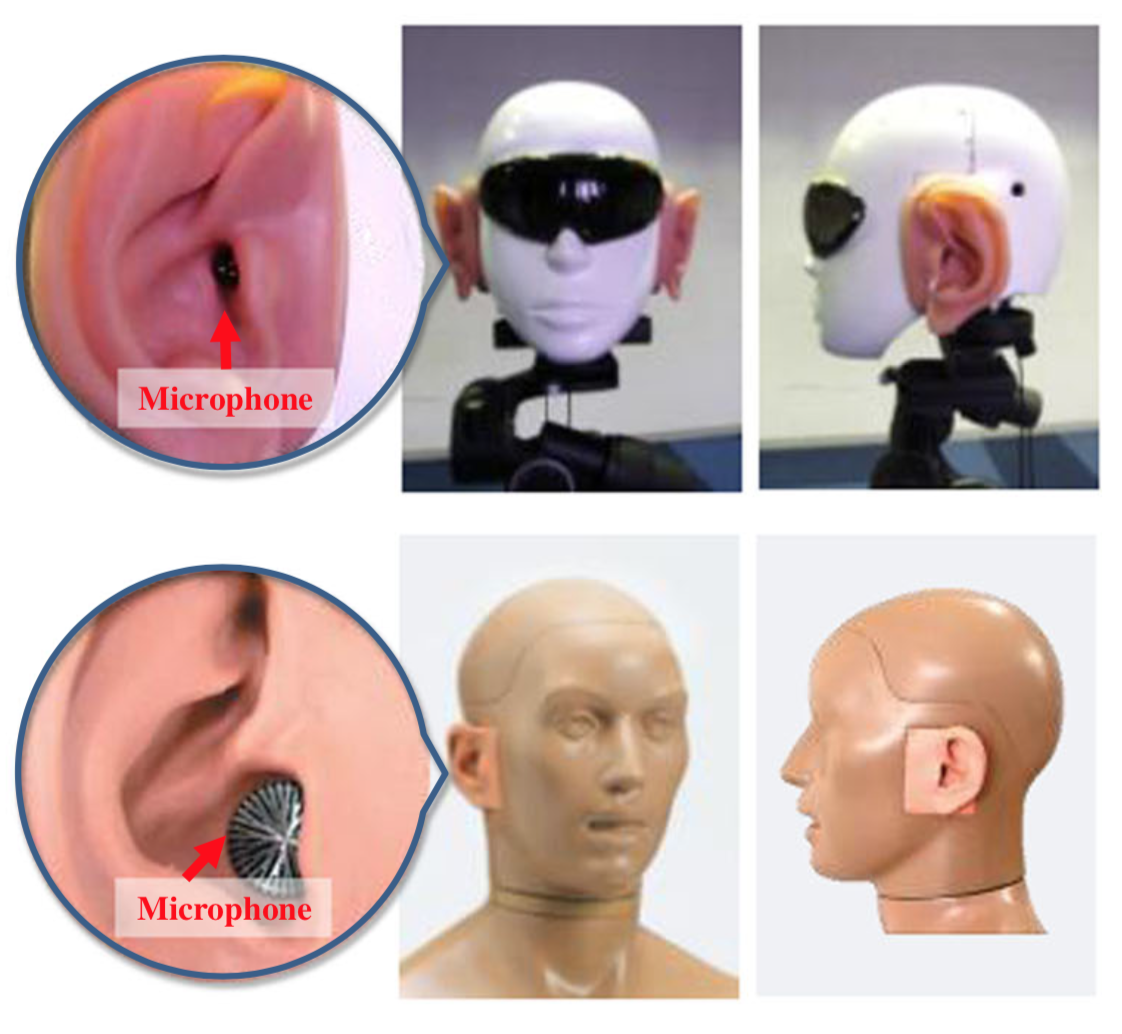
Jejich papír je trochu absurdní a pochybné důkazy pro ne jen pomocí mikrofonů v různých místech, ale myslím, že to bylo zábavné vidět tyto zásady uplatňovány.