Che cosa è coerente Lightwave sistema di comunicazione?
- Che cos’è la modulazione di intensità con rilevamento diretto (IM/DD)?
- Che cos’è la comunicazione ottica coerente?
- Perché abbiamo bisogno di sistemi Lightwave coerenti?
- Concetti di base alla base di sistemi Lightwave coerenti
- 1. Oscillatore locale
- 2. Rilevamento omodina
- 3. Rilevamento eterodina
- 4. Rapporto segnale-rumore
- Formati di modulazione
- 1. ASK Format
- 2. Formato PSK
- 3. Formato FSK
- Schemi di demodulazione
- 1. Demodulazione sincrona eterodina
- 2. Demodulazione asincrona eterodina
Che cos’è la modulazione di intensità con rilevamento diretto (IM/DD)?
I sistemi di comunicazione a onde luminose in fibra ottica sono basati su un semplice schema di trasmissione digitale in cui viene utilizzato un flusso di bit elettrico per modulare l’intensità del vettore ottico e il segnale ottico viene rilevato direttamente in un fotodiodo per convertirlo nel segnale digitale originale nel dominio elettrico.
Tale schema è indicato come modulazione di intensità con rilevamento diretto (IM/DD).
Che cos’è la comunicazione ottica coerente?
In contrasto con la modulazione di intensità con rilevamento diretto (IM / DD), molti schemi alternativi, ben noti nel contesto dei sistemi di comunicazione radio e microonde, trasmettono informazioni modulando la frequenza o la fase del vettore ottico e rilevano il segnale trasmesso utilizzando tecniche di rilevamento omodina o eterodina.
Poiché la coerenza di fase del vettore ottico svolge un ruolo importante nell’implementazione di tali schemi, vengono indicati come tecniche di comunicazione coerenti e i sistemi di comunicazione in fibra ottica basati su di essi sono chiamati sistemi di onde luminose coerenti.
Le tecniche di comunicazione coerenti sono state esplorate durante gli anni ‘ 80 e molte prove sul campo hanno stabilito la loro fattibilità entro il 1990.
Perché abbiamo bisogno di sistemi Lightwave coerenti?
La motivazione dietro l’uso delle tecniche di comunicazione coerenti è duplice.
1) La sensibilità del ricevitore può essere migliorata fino a 20dB rispetto ai sistemi IM / DD. Tale miglioramento consente una distanza di trasmissione molto più lunga (fino a 100 km aggiuntivi vicino a 1,55 um) per la stessa quantità di potenza del trasmettitore.
2) L’uso del rilevamento coerente consente un uso efficiente della larghezza di banda in fibra. Molti canali possono essere trasmessi simultaneamente sulla stessa fibra utilizzando il multiplexing a divisione di frequenza (FDM) con una spaziatura tra i canali di 1-10 GHz.
Concetti di base alla base di sistemi Lightwave coerenti
1. Oscillatore locale
L’idea di base alla base del sistema coherent lightwave è quella di mescolare il segnale ricevuto in modo coerente con un campo ottico ad onda continua (CW) prima che si verifichi un incidente sul fotorivelatore (come mostrato nella figura 1 sotto).
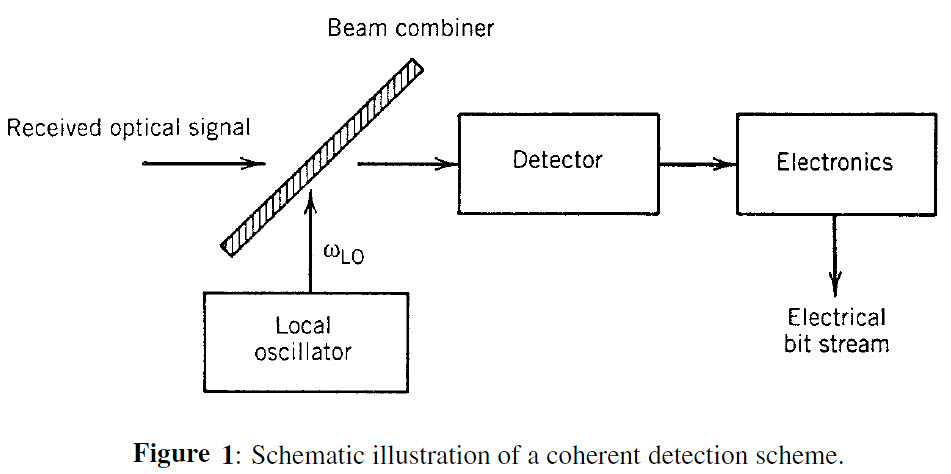
Il campo d’onda continua viene generato localmente sul ricevitore utilizzando un laser a larghezza di linea stretta, chiamato oscillatore locale (LO), un termine preso in prestito dalla letteratura radio e microonde.
Per vedere come la miscelazione del segnale ricevuto con un oscillatore locale può migliorare le prestazioni del ricevitore, scriviamo il segnale ottico usando la notazione complessa come
(Equazione 1.1)![]()
dove wo è la frequenza portante, così come l’ampiezza, e Φs è la fase.
Il campo ottico associato all’oscillatore locale è dato da un’espressione simile,
(Equazione 1.2)
![]()
dove ALO, wLO, e ΦLO rappresentano l’ampiezza, la frequenza e la fase dell’oscillatore locale, rispettivamente
scalare la notazione è utilizzato sia per Es e ELO dopo aver ammesso che i due campi sono identicamente polarizzata (polarizzazione-corrispondenza problemi possono essere discussi in seguito).
Poiché un fotorivelatore risponde all’intensità ottica, l’incidente di potenza ottica sul fotorivelatore è dato da
P = K|Es+ELO|2
dove K è una costante di proporzionalità.
Utilizzando gli Eq. (1.1 e 1.2), si ottiene
(Equazione 1.3)
![]()
dove
(Equazione 1.4)

La frequenza
![]()
è noto come la frequenza intermedia (IF).
Quando ω0 ≠ wLO, il segnale ottico viene demodulato in due fasi, la sua frequenza portante viene prima convertita in una frequenza intermedia vIF (tipicamente 0,1-5 GHz) prima che il segnale venga demodulato nella banda base.
Non è sempre necessario utilizzare una frequenza intermedia. In effetti, ci sono due diverse tecniche di rilevamento coerenti tra cui scegliere, a seconda che vIF sia uguale o meno a zero. Sono noti come tecniche di rilevamento omodina ed eterodina.
2. Rilevamento omodina
In questa tecnica di rilevamento coerente, la frequenza dell’oscillatore locale wLO viene selezionata in modo che coincida con la frequenza portante del segnale ω0 in modo che wIF = 0.
Dall’equazione 1.3, la fotocorrente (I=RP, dove R è la responsività del rivelatore) è data da
(Equazione 1.5)

In genere, PLO >> Ps e Ps + PLO ≈ PLO.
L’ultimo termine dell’equazione 1.5 contiene le informazioni trasmesse e viene utilizzato dal circuito decisionale. Considera il caso in cui la fase dell’oscillatore locale è bloccata alla fase del segnale in modo che Φs = ΦLO. Il segnale omodyne è quindi dato da
(Equazione 1.6)
![]()
Vantaggi del rilevamento Omodyne
Il vantaggio principale del rilevamento omodyne è evidente dall’equazione 1.6 se notiamo che la corrente del segnale nel caso di rilevamento diretto è data da Idd(t) = RPs(t). Denotando la potenza ottica media di ![]() , la potenza elettrica media viene aumentata di un fattore
, la potenza elettrica media viene aumentata di un fattore ![]() con l’uso del rilevamento omodyne.
con l’uso del rilevamento omodyne.
Poiché l’OLP può essere reso molto più grande di ![]() , il potenziamento della potenza può superare i 20 dB. Anche se il rumore sparato è anche migliorato, è dimostrato che il rilevamento omodina migliora il rapporto segnale-rumore (SNR) di un grande fattore.
, il potenziamento della potenza può superare i 20 dB. Anche se il rumore sparato è anche migliorato, è dimostrato che il rilevamento omodina migliora il rapporto segnale-rumore (SNR) di un grande fattore.
Un altro vantaggio del rilevamento coerente è evidente dall’equazione 1.5. Poiché l’ultimo termine in questa equazione contiene esplicitamente la fase del segnale, è possibile trasmettere informazioni modulando la fase o la frequenza del vettore ottico. Il rilevamento diretto non consente la modulazione di fase o frequenza, poiché tutte le informazioni sulla fase del segnale vengono perse.
Svantaggio del rilevamento Omodyne
Uno svantaggio del rilevamento omodyne deriva anche dalla sua sensibilità di fase. Poiché l’ultimo termine nell’equazione 1.5 contiene esplicitamente la fase ΦLO dell’oscillatore locale, chiaramente ΦLO dovrebbe essere controllato.
Idealmente, Φs e ΦLO dovrebbero rimanere costanti tranne che per la modulazione intenzionale di Φs. In pratica, sia Φs che ΦLO fluttuano nel tempo in modo casuale. Tuttavia, la loro differenza Φs-ΦLO può essere costretta a rimanere quasi costante attraverso un ciclo ottico bloccato in fase.
L’implementazione di tale loop non è semplice e rende la progettazione di ricevitori omodyne ottici piuttosto complicata. Inoltre, la corrispondenza delle frequenze del trasmettitore e dell’oscillatore locale impone requisiti rigorosi alle due sorgenti ottiche. Questi problemi possono essere superati con l’uso del rilevamento eterodina, come discusso di seguito.
3. Rilevamento eterodina
Nel caso di rilevamento eterodina la frequenza dell’oscillatore locale wLO è scelta per differire dalla frequenza portante del segnale ω0 in modo tale che la frequenza intermedia wIF si trovi nella regione delle microonde (vIF ~ 1 GHz). Usando l’equazione 1.3 insieme a I = RP, la fotocorrente è ora data da
(Equazione 1.7)
![]()
Poiché PLO > > Ps in pratica, il termine corrente continua (dc) è quasi costante e può essere rimosso facilmente utilizzando filtri passa banda. Il segnale eterodina è quindi dato dal termine corrente alternata (ac) nell’equazione 1.7 o da
(Equazione 1.8)

Simile al caso del rilevamento omodyne, le informazioni possono essere trasmesse attraverso l’ampiezza, la fase o la modulazione di frequenza del vettore ottico. Ancora più importante, l’oscillatore locale amplifica ancora il segnale ricevuto di un grande fattore, migliorando così l’SNR.
Tuttavia, il miglioramento SNR è inferiore di un fattore 2 (o di 3dB) rispetto al caso omodyne. Questa riduzione è indicata come penalità di rilevamento eterodina.
L’origine della penalità di 3dB può essere vista considerando la potenza del segnale (proporzionale al quadrato della corrente). A causa della natura ac di Iac, la potenza media del segnale è ridotta di un fattore 2 quando ![]() è una media su un ciclo completo alla frequenza intermedia (ricordiamo che la media di cos2θ su θ è 1/2).
è una media su un ciclo completo alla frequenza intermedia (ricordiamo che la media di cos2θ su θ è 1/2).
Vantaggi del rilevamento eterodina
Il vantaggio ottenuto a scapito della penalità di 3dB è che il design del ricevitore è notevolmente semplificato perché non è più necessario un loop ottico a blocco di fase.
Le fluttuazioni di Φs e ΦLO devono ancora essere controllate utilizzando laser a semiconduttore a larghezza di linea stretta per entrambe le sorgenti ottiche. Tuttavia, i requisiti linewidth sono abbastanza moderati quando viene utilizzato uno schema di demodulazione asincrona. Questa caratteristica rende lo schema di rilevamento eterodina abbastanza adatto per l’implementazione pratica in sistemi a onde luminose coerenti.
4. Rapporto segnale-rumore
Il vantaggio del rilevamento coerente per i sistemi lightwave può essere reso più quantitativo considerando l’SNR della corrente del ricevitore.
La corrente del ricevitore oscilla a causa del rumore del colpo e del rumore termico. La varianza σ2 della fluttuazione di corrente si ottiene sommando i due contributi in modo che
(Equazione 1.9)
![]()
dove
(Equazione 1.10)

La corrente I nell’equazione 1.10 è la fotocorrente totale generata dal rivelatore ed è data dall’equazione 1.5 o 1.7, a seconda che venga impiegato il rilevamento omodino o eterodino. In pratica, PLO > > Ps e I nell’equazione 1.10 possono essere sostituiti dal termine dominante RPLO per entrambi i casi.
L’SNR si ottiene dividendo la potenza media del segnale per la potenza media del rumore. Nel caso eterodina, è dato da
(Equazione 1.11)

Nel caso omodyne, l’SNR è più grande di un fattore 2 se assumiamo che Φs = ΦLO nell’equazione 1.5.
Il vantaggio principale del rilevamento coerente può essere visto dall’equazione 1.11. Dal momento che il PLO di potenza oscillatore locale può essere controllato al ricevitore, può essere fatto abbastanza grande che il rumore del ricevitore è dominato dal rumore colpo. Più specificamente, ![]() quando
quando
(Equazione 1.12)
Nelle stesse condizioni, i contributi dark-current al rumore sparato sono trascurabili (Id << RPLO). Il SNR è quindi dato da
(Equazione 1.13)
dove R = nq / hv.
L’uso del rilevamento coerente consente di raggiungere il limite di rumore di sparo anche per ricevitori p-i-n le cui prestazioni sono generalmente limitate dal rumore termico. Inoltre, in contrasto con il caso dei ricevitori avalanche photodiode (APD), questo limite è realizzato senza aggiungere alcun rumore di sparo in eccesso.
È utile esprimere l’SNR in termini di numero di fotoni, Np, ricevuti all’interno di un singolo bit. Al bit rate B, la potenza del segnale ![]() è correlata a Np come
è correlata a Np come ![]() . Tipicamente Δf ≈ B / 2. Usando questi valori di
. Tipicamente Δf ≈ B / 2. Usando questi valori di ![]() e Δf nell’equazione 1.13, il SNR è dato da una semplice espressione
e Δf nell’equazione 1.13, il SNR è dato da una semplice espressione
(Equazione 1.14)
![]()
Nel caso di rilevamento omodina, SNR è più grande di un fattore 2 ed è dato da SNR = 4nNp. Ci sono più discussioni per quanto riguarda la dipendenza del BER su SNR e mostra come la sensibilità del ricevitore è migliorata con l’uso di rilevamento coerente.
Formati di modulazione
Come abbiamo detto in precedenza, un importante vantaggio dell’utilizzo delle tecniche di rilevamento coerente è che sia l’ampiezza che la fase del segnale ottico ricevuto possono essere rilevati e misurati. Questa caratteristica apre la possibilità di inviare informazioni modulando l’ampiezza, o la fase, o la frequenza di un vettore ottico.
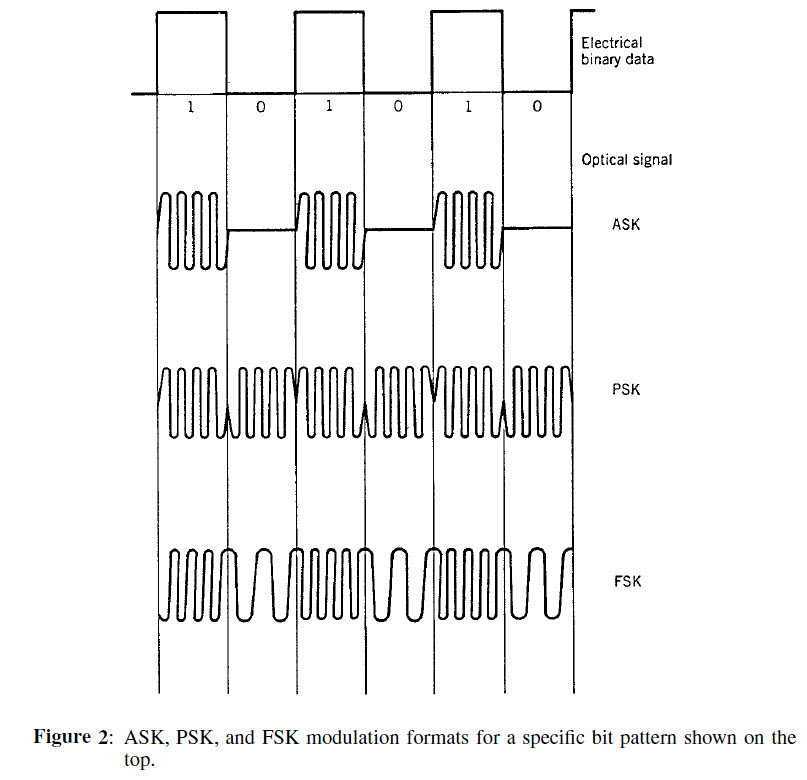
Nel caso dei sistemi di comunicazione digitale, le tre possibilità danno origine a tre formati di modulazione noti come amplitude-shift keying (ASK), phase-shift keying (PSK) e frequency-shift keying (FSK).
La figura 2 seguente mostra schematicamente i tre formati di modulazione per un modello di bit specifico.
1. ASK Format
Il campo elettrico associato a un segnale ottico può essere scritto come
(Equazione 2.1)
![]()
Nel caso del formato ASK, l’ampiezza As viene modulata mantenendo costanti ω0 e Φs. Per la modulazione digitale binaria, As prende uno dei due valori fissi durante ogni periodo di bit, a seconda che venga trasmesso 1 o 0 bit.
Nella maggior parte delle situazioni pratiche, As è impostato su zero durante la trasmissione di 0 bit. Il formato ASK viene quindi chiamato on-off keying (OOK) ed è identico allo schema di modulazione comunemente usato per i sistemi a onde luminose digitali non coerenti (IM/DD).
L’implementazione di ASK for coherent systems differisce dal caso dei sistemi di rilevamento diretto per un aspetto importante. Mentre il flusso di bit ottico per i sistemi di rilevamento diretto può essere generato modulando direttamente un diodo ad emissione luminosa (LED) o un laser a semiconduttore, la modulazione esterna è necessaria per i sistemi di comunicazione coerenti.
La ragione di questa necessità è legata ai cambiamenti di fase che si verificano invariabilmente quando l’ampiezza As (o la potenza) viene modificata modulando la corrente applicata a un laser a semiconduttore. Per i sistemi IM / DD, tali cambiamenti di fase non intenzionali non sono visti dal rivelatore (poiché il rivelatore risponde solo alla potenza ottica) e non sono di grande preoccupazione tranne che per la penalità di potenza indotta da chirp.
La situazione è completamente diversa nel caso di sistemi coerenti, dove la risposta del rivelatore dipende dalla fase del segnale ricevuto. L’implementazione del formato ASK per sistemi coerenti richiede che la fase Φs rimanga quasi costante. Ciò si ottiene azionando il laser a semiconduttore continuamente a una corrente costante e modulando la sua uscita utilizzando un modulatore esterno.
Poiché tutti i modulatori esterni hanno alcune perdite di inserzione, una penalità di potenza incorre ogni volta che viene utilizzato un modulatore esterno; può essere ridotto al di sotto di 1dB per modulatori integrati monoliticamente.
Un modulatore esterno comunemente usato fa uso di guide d’onda LiNbO3 in una configurazione Mach-Zehnder (MZ). Le prestazioni dei modulatori esterni sono quantificate attraverso il rapporto on-off (chiamato anche rapporto di estinzione) e la larghezza di banda di modulazione. I modulatori LiNbO3 forniscono un rapporto on-off superiore a 20 e possono essere modulati a velocità fino a 75GHz. La tensione di pilotaggio è tipicamente 5V ma può essere ridotta a 3V con un design adatto.
Altri materiali possono essere utilizzati anche per realizzare modulatori esterni. Ad esempio, un modulatore polimerico elettro-ottico MZ richiedeva solo 1,8 V per spostare la fase di un segnale 1,55 um di π in uno dei bracci dell’interferometro MZ.
I modulatori di elettroassorbimento, realizzati con semiconduttori, sono spesso preferiti perché non richiedono l’uso di un interferometro e possono essere integrati monoliticamente con il laser. I trasmettitori ottici con un modulatore di elettroassorbimento integrato in grado di modulare a 10 Gb/s sono disponibili dal 1999 e vengono utilizzati abitualmente per i sistemi IM/DD lightwave. Tali modulatori integrati esibivano una larghezza di banda di oltre 50GHz e avevano il potenziale di operare a velocità in bit fino a 100 Gb/s. È probabile che siano impiegati anche per sistemi coerenti.
2. Formato PSK
Nel caso del formato PSK, il flusso di bit ottico viene generato modulando la fase Φs nell’equazione 2.1 mentre l’ampiezza As e la frequenza ω0 del vettore ottico sono mantenute costanti.
Per PSK binario, la fase Φs prende due valori, comunemente scelti per essere 0 e π. Figura 2 sopra mostra il formato PSK binario schematicamente per un modello di bit specifico.
Un aspetto interessante del formato PSK è che l’intensità ottica rimane costante durante tutti i bit e il segnale sembra avere una forma CW. Il rilevamento coerente è una necessità per PSK poiché tutte le informazioni andrebbero perse se il segnale ottico venisse rilevato direttamente senza mescolarlo con l’uscita di un oscillatore locale.
L’implementazione di PSK richiede un modulatore esterno in grado di cambiare la fase ottica in risposta a una tensione applicata. Il meccanismo fisico utilizzato da tali modulatori è chiamato elettrorefrazione. Qualsiasi cristallo elettro-ottico con orientamento corretto può essere utilizzato per la modulazione di fase.
Un cristallo LiNbO3 è comunemente usato nella pratica. Il design dei modulatori di fase basati su LiNbO3 è molto più semplice di quello di un modulatore di ampiezza in quanto non è più necessario un interferometro Mach-Zehnder e può essere utilizzata una singola guida d’onda.
Lo sfasamento δφ che si verifica mentre il segnale CW passa attraverso la guida d’onda è correlato alla variazione dell’indice δn dalla relazione semplice
(Equazione 2.2)
![]()
dove lm è la lunghezza su cui la variazione dell’indice è indotta dalla tensione applicata. La variazione dell’indice δn è proporzionale alla tensione applicata, che viene scelta in modo tale che δφ = π. Pertanto, uno sfasamento di π può essere imposto al vettore ottico applicando la tensione richiesta per la durata di ciascun bit “1”.
I semiconduttori possono anche essere usati per realizzare modulatori di fase, specialmente se viene utilizzata una struttura multi-quantum-well (MQW). L’effetto di elettrorefrazione originato dall’effetto Stark di confinamento quantico è migliorato per un design di pozzo quantico. Tali modulatori di fase MQW sono stati sviluppati e sono in grado di funzionare a un bit rate fino a 40 Gb/s nella gamma di lunghezze d’onda 1,3-1,6 um.
Già nel 1992, i dispositivi MQW avevano una larghezza di banda di modulazione di 20 GHz e richiedevano solo 3,85 V per introdurre uno sfasamento π quando funzionavano vicino a 1,55 um. La tensione operativa è stata ridotta a 2,8 V in un modulatore di fase basato sull’effetto di elettroassorbimento in una guida d’onda MQW.
Un convertitore spot-size è talvolta integrato con il modulatore di fase per ridurre le perdite di accoppiamento. Le migliori prestazioni si ottengono quando un modulatore di fase a semiconduttore è integrato monoliticamente all’interno del trasmettitore. Tali trasmettitori sono abbastanza utili per sistemi di onde luminose coerenti.
L’uso del formato PSK richiede che la fase del vettore ottico rimanga stabile in modo che le informazioni sulla fase possano essere estratte dal ricevitore senza ambiguità. Questo requisito pone una condizione rigorosa sulle linee tollerabili del laser del trasmettitore e dell’oscillatore locale.
Il requisito della larghezza di riga può essere un po ‘ rilassato utilizzando una variante del formato PSK, noto come differential phase-shift keying (DPSK). Nel caso DPSK, le informazioni vengono codificate utilizzando la differenza di fase tra due bit vicini. Ad esempio, se φk rappresenta la fase del bit kth, la differenza di fase Δφ = φk – φk-1 viene modificata da π o 0, a seconda che il bit kth sia un bit 1 o 0.
Il vantaggio di DPSK è che il segnale di trasmissione può essere demodulato con successo finché la fase portante rimane relativamente stabile per una durata di due bit.
3. Formato FSK
Nel caso della modulazione FSK, le informazioni vengono codificate sul vettore ottico spostando la frequenza portante ω0 stessa. Per un segnale digitale binario, ω0 assume due valori, ω0 + Δω e ω0-Δω, a seconda che venga trasmesso un bit 1 o 0.
Lo spostamento Δf = Δω / 2π è chiamato deviazione di frequenza. La quantità 2Δf è talvolta chiamata spaziatura dei toni, in quanto rappresenta la spaziatura di frequenza tra 1 e 0 bit.
Il campo ottico per il formato FSK può essere scritto come
(Equazione 2.3)
![]()
dove i segni + e-corrispondono a 1 e 0 bit.
Notando che l’argomento del coseno può essere scritto come ![]() , il formato FSK può anche essere visto come una sorta di modulazione PSK tale che la fase portante aumenta o diminuisce linearmente sulla durata del bit.
, il formato FSK può anche essere visto come una sorta di modulazione PSK tale che la fase portante aumenta o diminuisce linearmente sulla durata del bit.
La scelta della deviazione di frequenza Δf dipende dalla larghezza di banda disponibile. La larghezza di banda totale di un segnale FSK è data approssimativamente da 2Δf + 2B, dove B è il bit rate.
Quando Δf > > B, la larghezza di banda si avvicina a 2Δf ed è quasi indipendente dal bit rate. Questo caso è spesso definito come deviazione larga o FSK a banda larga.
Nel caso opposto di Δf << B, chiamato stretta deviazione o stretta FSK, la larghezza di banda approcci 2B.
Il rapporto ßFM = Δf/B, chiamato modulazione di frequenza (FM) indice, serve a distinguere i due casi, a seconda che ßFM >> 1 o ßFM << 1.
L’implementazione di FSK richiede modulatori in grado di spostare la frequenza del segnale ottico incidente. Materiali elettro-ottici come LiNbO3 normalmente producono uno sfasamento proporzionale alla tensione applicata. Possono essere utilizzati per FSK applicando un impulso di tensione triangolare (a dente di sega), poiché un cambiamento di fase lineare corrisponde a uno spostamento di frequenza.
Una tecnica alternativa fa uso di Bragg scattering da onde acustiche. Tali modulatori sono chiamati modulatori acustoottici. Il loro uso è un po ‘ ingombrante nella forma sfusa. Tuttavia, essi possono fabbricati in forma compatta utilizzando onde acustiche di superficie su una guida d’onda lastra. La struttura del dispositivo è simile a quella di un filtro acustoottico utilizzato per applicazioni WDM (Wavelength-division multiplexing). Lo spostamento di frequenza massima se in genere limitato al di sotto di 1 GHz per tali modulatori.
Il metodo più semplice per produrre un segnale FSK utilizza la capacità di modulazione diretta dei laser a semiconduttore. Come discusso prima, un cambiamento nella corrente operativa di un laser a semiconduttore porta a cambiamenti sia nell’ampiezza che nella frequenza della luce emessa. Nel caso di ASK, lo spostamento di frequenza o il chirp dell’impulso ottico emesso è indesiderabile. Ma lo stesso spostamento di frequenza può essere utilizzato a vantaggio ai fini di FSK. Tipicamente i valori degli spostamenti di frequenza sono ~ 1GHz / mA. Pertanto, è necessaria solo una piccola variazione della corrente operativa (~1mA) per produrre il segnale FSK. Tali cambiamenti di corrente sono abbastanza piccoli che l’ampiezza non cambia molto da bit a bit.
Ai fini di FSK, la risposta FM di un laser a feedback distribuito (DFB) dovrebbe essere piatta su una larghezza di banda pari al bit rate. Come si vede nella figura 3 qui sotto, la maggior parte dei laser DFB mostrano un tuffo nella loro risposta FM ad una frequenza vicino a 1 MHz. Il motivo è che due diversi fenomeni fisici contribuiscono allo spostamento di frequenza quando la corrente del dispositivo viene modificata. I cambiamenti nell’indice di rifrazione, responsabili dello spostamento di frequenza, possono verificarsi a causa di uno spostamento di temperatura o a causa di un cambiamento nella densità del vettore. Gli effetti termici contribuiscono solo fino a frequenze di modulazione di circa 1MHz a causa della loro risposta lenta. La risposta FM diminuisce nella gamma di frequenza 0.1-10MHz a causa del contributo termico e il contributo della densità portante si verifica con fasi opposte.
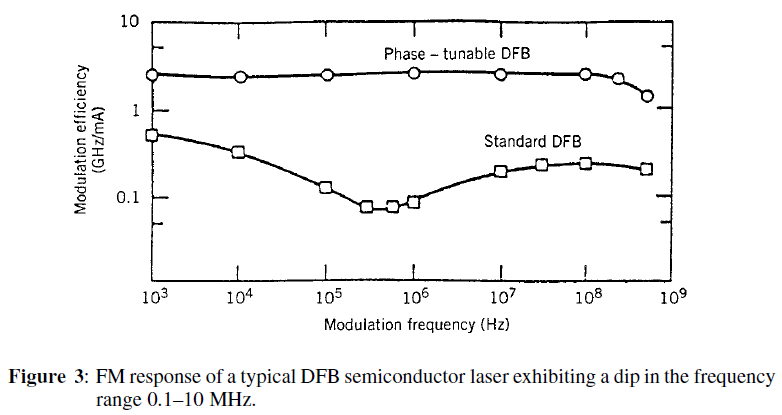
Diverse tecniche possono essere utilizzate per rendere la risposta FM più uniforme. Un circuito di equalizzazione migliora l’uniformità ma riduce anche l’efficienza di modulazione. Un’altra tecnica fa uso di codici di trasmissione che riducono le componenti a bassa frequenza dei dati in cui la distorsione è più alta. I laser multi-sezione DFB sono stati sviluppati per realizzare una risposta FM uniforme. La figura 3 mostra la risposta FM di un laser DFB a due sezioni. Non è solo uniforme fino a circa 1 GHz, ma anche la sua efficienza di modulazione è elevata. Prestazioni ancora migliori sono realizzate utilizzando laser DBR a tre sezioni.
La risposta FM piatta da 100 kHz a 15 GHz è stata dimostrata nel 1990 in tali laser. Nel 1995, l’uso di laser DFB accoppiati a guadagno, sfasati, estese la gamma di risposta FM uniforme da 10 kHz a 20 GHz. Quando FSK viene eseguita attraverso modulazione diretta, la fase portante varia continuamente da bit a bit. Questo caso è spesso definito come FSK in fase continua (CPFSK). Quando la spaziatura del tono 2Δf è scelta per essere B/2 (ßFM = 1/2), CPFSK è anche chiamato minimum-shift keying (MSK).
Schemi di demodulazione
Come discusso sopra, il rilevamento omodino o eterodino può essere utilizzato per convertire il segnale ottico ricevuto in una forma elettrica.
Nel caso di rilevamento omodina, il segnale ottico viene demodulato direttamente sulla banda base. Anche se semplice nel concetto, il rilevamento omodina è difficile da implementare nella pratica, in quanto richiede un oscillatore locale la cui frequenza corrisponde esattamente alla frequenza portante e la cui fase è bloccata al segnale in ingresso. Tale schema di demodulazione è chiamato sincrono ed è essenziale per il rilevamento omodino. Sebbene i loop ottici a blocco di fase siano stati sviluppati per questo scopo, il loro uso è complicato nella pratica.
La rilevazione eterodina semplifica il design del ricevitore, poiché non è richiesto né il blocco ottico di fase né la corrispondenza di frequenza dell’oscillatore locale. Tuttavia, il segnale elettrico oscilla rapidamente alle frequenze a microonde e deve essere demodulato dalla banda IF alla banda base utilizzando tecniche simili a quelle sviluppate per i sistemi di comunicazione a microonde.
La demodulazione può essere eseguita in modo sincrono o asincrono. La demodulazione asincrona è anche chiamata incoerente nella letteratura sulle comunicazioni radio. Nella letteratura di comunicazione ottica, il termine rilevamento coerente è usato in un senso più ampio. Un sistema lightwave è chiamato coerente purché utilizzi un oscillatore locale indipendentemente dalla tecnica di demodulazione utilizzata per convertire il segnale IF in frequenze in banda base.
Ci concentreremo sugli schemi di demodulazione sincrona e asincrona per sistemi eterodini.
1. Demodulazione sincrona eterodina
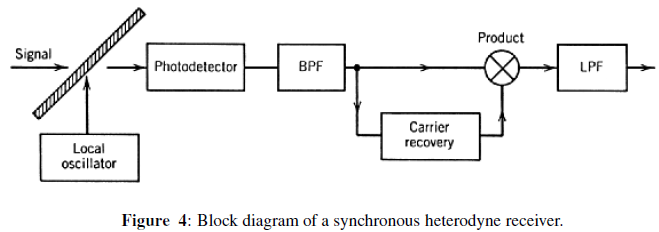
La figura 4 mostra schematicamente un ricevitore eterodino sincrono. La corrente generata al fotodiodo viene fatta passare attraverso un filtro passa banda (BPF) centrato alla frequenza intermedia wIF. La corrente filtrata in assenza di rumore può essere scritta come
(Equazione 3.1)
![]()
dove ![]() e φ = φLO-φs è la differenza di fase tra l’oscillatore locale e il segnale. Il rumore viene anche filtrato dal BPF. Utilizzando i componenti in quadratura in fase e fuori fase del rumore gaussiano filtrato, il rumore del ricevitore è incluso attraverso
e φ = φLO-φs è la differenza di fase tra l’oscillatore locale e il segnale. Il rumore viene anche filtrato dal BPF. Utilizzando i componenti in quadratura in fase e fuori fase del rumore gaussiano filtrato, il rumore del ricevitore è incluso attraverso
(Equazione 3.2)
![]()
dove ic e is sono variabili casuali gaussiane di media zero con varianza σ2 data dall’equazione 1.9. Per la demodulazione sincrona, If (t) viene moltiplicato per cos(wIFt) e filtrato da un filtro passa-basso. Il segnale in banda base risultante è
(Equazione 3.3)
![]()
dove le parentesi angolari denotano il filtraggio passa-basso utilizzato per respingere i componenti ac oscillanti a 2wIF. Equazione (3.3) mostra che solo la componente di rumore in fase influisce sulle prestazioni dei ricevitori eterodina sincroni.
La demodulazione sincrona richiede il recupero del vettore a microonde alla frequenza intermedia wIF. Diversi schemi elettronici possono essere utilizzati per questo scopo, tutti che richiedono una sorta di circuito elettrico a blocco di fase. Due cicli comunemente usati sono il ciclo di quadratura e il ciclo di Costas. Un ciclo di quadratura utilizza un dispositivo di legge quadrata per ottenere un segnale della forma cos2 (wIFt) che ha una componente di frequenza a 2wIF. Questo componente può essere utilizzato per generare un segnale a microonde a wIF.
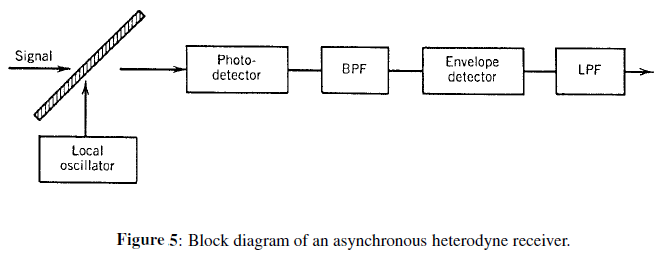
2. Demodulazione asincrona eterodina
La figura 5 seguente mostra schematicamente un ricevitore eterodina asincrono. Non richiede il recupero del supporto a microonde alla frequenza intermedia, risultando in un design del ricevitore molto più semplice. Il segnale filtrato If (t) viene convertito in banda base utilizzando un rivelatore di inviluppo, seguito da un filtro passa-basso.
Il segnale ricevuto dal circuito decisionale è solo Id = / If/, dove If è dato da Eq. (3.2). Può essere scritto come
(Equazione 3.4)
![]()
La differenza principale è che sia i componenti in quadratura in fase che quelli fuori fase del rumore del ricevitore influenzano il segnale. Il SNR è quindi degradato rispetto al caso della demodulazione sincrona. Come discusso, la degradazione della sensibilità derivante dal SNR ridotto è piuttosto piccola (circa 0,5 dB). Poiché i requisiti di stabilità di fase sono piuttosto modesti nel caso della demodulazione asincrona, questo schema è comunemente usato per sistemi a onde luminose coerenti.
Il ricevitore eterodina asincrono mostrato in Fig. 5 richiede modifiche quando vengono utilizzati i formati di modulazione FSK e PSK.
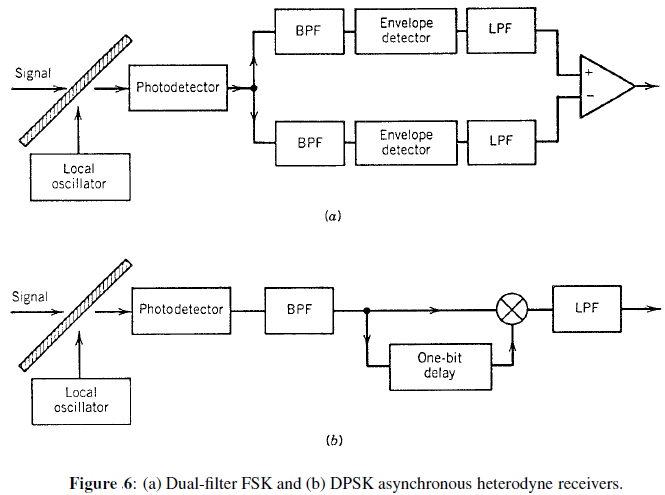
La figura 6 mostra due schemi di demodulazione. Il ricevitore a doppio filtro FSK utilizza due rami separati per elaborare i bit 1 e 0 le cui frequenze portanti, e quindi le frequenze intermedie, sono diverse. Lo schema può essere utilizzato ogni volta che la spaziatura dei toni è molto più grande dei bit rate, in modo che gli spettri di 1 e 0 bit abbiano una sovrapposizione trascurabile (wide-deviation FSK). I due BPF hanno le loro frequenze centrali separate esattamente dalla spaziatura del tono in modo che ogni BPF passi solo 1 o 0 bit.
Il ricevitore a doppio filtro FSK può essere pensato come due ricevitori a filtro singolo ASK in parallelo le cui uscite vengono combinate prima di raggiungere il circuito decisionale. Un ricevitore a filtro singolo di Fig. può essere utilizzato per la demodulazione FSK se la sua larghezza di banda è scelta per essere abbastanza ampia da passare l’intero flusso di bit. Il segnale viene quindi elaborato da un discriminatore di frequenza per identificare 1 e 0 bit. Questo schema funziona bene solo per FSK a deviazione stretta, per il quale la spaziatura dei toni è inferiore o paragonabile al bit rate (ßFM ≤ 1).
La demodulazione asincrona non può essere utilizzata nel caso del formato PSK perché la fase del laser del trasmettitore e l’oscillatore locale non sono bloccati e possono andare alla deriva con il tempo. Tuttavia, l’uso del formato DPSK consente la demodulazione asincrona utilizzando lo schema di ritardo mostrato in Fig. 6, lettera b).
L’idea è di moltiplicare il flusso di bit ricevuto per una replica di esso che è stata ritardata di un periodo di bit. Il segnale risultante ha un componente della forma cos (φk-φk− 1), dove φk è la fase del bit kth, che può essere utilizzato per recuperare il modello di bit poiché l’informazione è codificata nella differenza di fase φk−φk-1. Tale schema richiede stabilità di fase solo su pochi bit e può essere implementato utilizzando laser a semiconduttore DFB. Lo schema di demodulazione delay può essere utilizzato anche per CPFSK. La quantità di ritardo in questo caso dipende dalla spaziatura del tono e viene scelta in modo tale che la fase sia spostata di π per il segnale ritardato.