Na Biologii

Hmyz a jejich příbuzným poskytují hlavní část živočišná biomasa v mnoha suchozemských ekosystémů. Jako oni obývají téměř všechna prostředí, včetně lidské práce a životních místech jsme vždy potýkal s jejich společnosti. Nicméně, i když oni tečení a potopit se o kloubové nohy, stejně jako obratlovci jako my, těla členovců odchyluje ohromně z nás.
Vezměme si pouze jejich typicky rozlehlé držení těla a vysoký počet chodících nohou, které výrazně ovlivňují způsob, jakým se tito tvorové pohybují. Jako důsledek mají vždy více než dvě nohy na zemi přes širokou škálu běží rychlostí poskytuje vysokou statickou stabilitu. Tyto funkce přilákat pozornost inženýrů zaměřených na vytváření nohama strojů, které se jednoho dne splní kolo poháněné zařízení na drsné a zrádný terén.

je všeobecně známo, že u obratlovců, chůze změny jsou neodmyslitelnou součástí lokomoce umožňující přijatelné výdaje na energie přes širokou škálu pozemní podmínky a provozní rychlosti. Tak, různých chodů jsou dobře popsány a analyzovány v dvojnožců jako muži a čtvernožců, jako jsou naše citově nejbližší bližní, jako koně a psy. Tyto změny chůze jsou primárně charakterizovány změnami v dynamice těla, tj. zda a jak je pohybová energie dočasně uložena v elastických strukturách, jako je Achillova šlacha nebo oblouk chodidla, a obnovena pro další krok.
pro rychle běžící hmyz a navzdory jejich ekologickému významu a roli biologických modelů pro technické implementace je naše první studie zaměřená na změny chůze a dopad kluzkosti na jejich běžecké schopnosti. Za tímto účelem jsme odehnal švábi přes úzký kanál, jehož podlaha byla lemována papírem definovaných drsnost velikostí a natočil běží s vysokorychlostní kamerou.
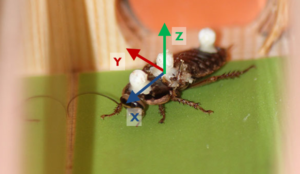
s naším experimentálním přístupem jsme byli schopni prokázat, že rychle běžící hmyz přizpůsobuje svou chůzi střední rychlostí úpravou struktury koordinace nohou a dynamiky těla. Dát to rovnou, zvířata přešel z multi-legged ekvivalent klus Nauphoeta Pomalé (Doplňkový Soubor 2) s přísně střídavý sady nohou na střední rychlosti, na multi-legged verze tölt při vysoké provozní rychlosti Nauphoeta Rychle (Doplňující Soubor 1). Zatímco klus se vyznačuje opakujícími se pohyby těla zvířat nahoru a dolů, tölt je chůze, pro kterou jsou Islandští koně známí a která umožňuje obzvláště plynulé jízdy.
V případě, že hmyz, který běží s až 15 kroků za sekundu chůze posun může vést také ve stabilizaci pohled, který by jinak oscilovat s každým krokem, což vede k silně rozmazané vidění.
byli jsme obzvláště překvapeni, když jsme zjistili, že upravená koordinace nohou se synchronizuje s posunem mechanismů, které stabilizují pohyb zvířat. Takto upravená chůze při vysoké rychlosti a na kluzkém povrchu byla doprovázena posunem od statické k dynamické stabilizaci. Tento posun minimalizuje potřebu centrálního nervového systému řídit pohyb a současně dosáhnout vysoké energetické účinnosti.
Proto, přizpůsobení koordinační vzory robot nohy těm, rychle běží švábů by mohla pomoci poly-pedál roboty spalovat energii efektivněji, a tím zvýšit jeho odolnost v nehostinném prostředí. Doufáme, že náš výzkum může pomoci přesvědčit inženýry, že nestačí jen zvýšit dlouhý krok frekvence za účelem zvýšení rychlosti, když výdej energie a hladkost jízdy jsou rovněž relevantní kriteria.