On Biology

insecten en hun verwanten zorgen voor een groot deel van de faunale biomassa in veel terrestrische ecosystemen. Omdat ze bijna alle omgevingen bevolken, inclusief menselijke werk-en woonplaatsen, worden we altijd geconfronteerd met hun bedrijf. Echter, hoewel ze kruipen en rondzwerven met gelede benen net als gewervelde dieren zoals wij doen, wijkt het lichaamsplan van geleedpotigen enorm af van het onze.
laten we alleen hun typische uitgestrekte houding en het grote aantal lopende benen nemen die de manier waarop deze wezens bewegen aanzienlijk beïnvloeden. Als gevolg daarvan hebben ze altijd meer dan twee poten op de grond over een breed scala aan rijsnelheden die een hoge statische stabiliteit bieden. Deze kenmerken trekken de aandacht van ingenieurs die gericht zijn op de bouw van machines met benen die op een dag beter zullen presteren dan wielaangedreven apparaten op robuust en verraderlijk terrein.

het is algemeen bekend dat, Voor gewervelde dieren, veranderingen in de loop een inherent kenmerk zijn van de beweging waardoor een aanvaardbaar energieverbruik over een breed scala van grondomstandigheden en loopsnelheden mogelijk is. Zo worden verschillende gangen goed beschreven en geanalyseerd in tweevoeters zoals mannen en viervoeters zoals onze emotioneel naaste medemensen, zoals paarden en gedomesticeerde honden. Deze gangveranderingen worden voornamelijk gekenmerkt door veranderingen in de lichaamsdynamiek, d.w.z. of en hoe bewegingsenergie tijdelijk wordt opgeslagen in elastische structuren, zoals de achillespees of de voetboog, en wordt teruggewonnen voor de volgende stap.
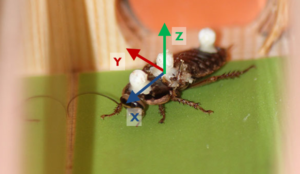
voor snel lopende insecten en ondanks hun ecologische belang en hun rol als biologische modellen voor technische implementaties, is ons eerste onderzoek gericht op loopveranderingen en de impact van slipperigheid op hun loopvermogen. Daartoe schoten we de kakkerlakken door een smal kanaal waarvan de vloer was bekleed met schuurpapier van gedefinieerde asperity maten en filmde de runs met een high-speed camera.
met onze experimentele aanpak konden we aantonen dat snel lopende insecten hun gang halverwege aanpassen door hun beencoördinatiepatroon en hun lichaamsdynamiek aan te passen. Om het recht te zetten, de dieren overgestapt van een multi-legged equivalent van draf nauphoeta Slow (aanvullend bestand 2) met strikt afwisselende sets van benen bij gemiddelde snelheden, naar een multi-legged versie van tölt bij hoge rijsnelheden Nauphoeta Fast (aanvullend bestand 1). Terwijl draf wordt gekenmerkt door repetitieve op-en neerbewegingen van het lichaam van de dieren, is tölt een gang waar IJslandse paarden beroemd om zijn en die bijzonder soepele ritten mogelijk maakt.
bij insecten die tot 15 stappen per seconde lopen, kan de gangverschuiving ook resulteren in een stabilisatie van de blik, die anders zou oscilleren bij elke stap, wat leidt tot ernstig wazig zien.Het verbaasde ons bijzonder dat de aangepaste beencoördinatie synchroniseert met een verschuiving in de mechanismen die de beweging van de dieren stabiliseren. Zo ging de gewijzigde gang bij hoge snelheid en op gladde oppervlakken gepaard met een verschuiving van statische naar dynamische stabilisatie. Deze verschuiving minimaliseert de behoefte van het centrale zenuwstelsel om de beweging te controleren terwijl tegelijkertijd het bereiken van hoge energie-efficiëntie.Het aanpassen van de coördinatiepatronen van robotpoten aan die van snel lopende kakkerlakken zou de polypedaalrobots kunnen helpen efficiënter energie te verbranden en zo het uithoudingsvermogen in onherbergzame omgevingen te vergroten. We hopen dat ons onderzoek kan helpen om ingenieurs te overtuigen dat het niet genoeg is om alleen de pasfrequentie te verhogen om de snelheid te verhogen wanneer energieverbruik en gladheid van de rit ook relevante criteria zijn.