på biologi

insekter og deres slægtninge udgør en stor del af faunalbiomassen i mange terrestriske økosystemer. Da de befolker næsten alle miljøer, herunder menneskeligt arbejde og levende steder, står vi altid over for deres virksomhed. Men selvom de kryber og scuttle om med leddelte ben ligesom hvirveldyr som os gør, afviger kropsplanen af leddyr enormt fra vores.
lad os kun tage deres typisk spredte kropsholdning og det høje antal gangben, der påvirker den måde, disse skabninger bevæger sig på. Som følge heraf har de altid mere end to ben på jorden over en bred vifte af kørehastigheder, der giver høj statisk stabilitet. Disse funktioner tiltrækker ingeniører, der sigter mod at konstruere benede maskiner, der en dag overgår hjuldrevne enheder på robust og forræderisk terræn.

det er almindeligt kendt, at for hvirveldyr er gangændringer et iboende træk ved bevægelse, der muliggør acceptable energiforbrug over en lang række jordforhold og kørehastigheder. Således er forskellige gangarter godt beskrevet og analyseret i toben som mænd og firbenede som vores følelsesmæssigt nærmeste medskabninger, som heste og husdyr. Disse gangændringer er primært karakteriseret ved ændringer i kroppens dynamik, dvs. hvorvidt og hvordan bevægelsesenergi midlertidigt opbevares i elastiske strukturer, såsom akillessenen eller fodbuen, og genvindes til det næste skridt.
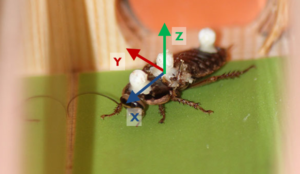
for hurtigt kørende insekter og på trods af deres økologiske betydning og deres rolle som biologiske modeller for tekniske implementeringer er vores den første undersøgelse med fokus på gangændringer og virkningen af glathed på deres løbeevner. Til dette formål skød vi kakerlakkerne gennem en smal kanal, hvis gulv var foret med sandpapir med definerede asperitetsstørrelser og videooptagede løbene med et højhastighedskamera.
med vores eksperimentelle tilgang var vi i stand til at demonstrere, at hurtigt kørende insekter tilpasser deres gang i mellemhastighed ved at justere deres benkoordinationsmønster og deres kropsdynamik. For at sige det lige skiftede dyrene fra en flerbenet ækvivalent med trav Nauphoeta langsom (supplerende fil 2) med strengt skiftende sæt ben i mellemhastigheder til en flerbenet version af T-larslt ved høje kørehastigheder Nauphoeta Fast (supplerende fil 1). Mens trav er kendetegnet ved gentagne op-og nedadgående bevægelser af dyrenes krop, er T jourslt en gangart, som islandske heste er berømte for, og som muliggør særligt glatte rides.
i tilfælde af insekter, der løber med op til 15 skridt i sekundet, kan gangskiftet også resultere i en stabilisering af blikket, som ellers ville svinge med hvert trin, hvilket resulterer i alvorligt sløret syn.
vi var især overraskede over at finde ud af, at den justerede benkoordinering synkroniseres med et skift i de mekanismer, der stabiliserer dyrenes bevægelse. Således blev den modificerede gang ved høj hastighed og på glatte overflader ledsaget af et skift fra statisk til dynamisk stabilisering. Dette skift minimerer centralnervesystemet behov for at styre bevægelsen samtidig opnå høj energieffektivitet.
derfor kan tilpasning af robotbenets koordinationsmønstre til hurtigkørende kakerlakker hjælpe Poly-pedalrobotter med at forbrænde energi mere effektivt og dermed øge dens udholdenhed i ugæstfrie miljøer. Vi håber, at vores forskning kan være med til at overbevise ingeniører om, at det ikke er nok kun at øge skridtfrekvensen for at øge hastigheden, når energiforbrug og glathed i turen også er relevante kriterier.