Sur la biologie

Les insectes et leurs parents fournissent une part importante de la biomasse faunique dans de nombreux écosystèmes terrestres. Comme ils peuplent presque tous les environnements, y compris le travail humain et les lieux de vie, nous sommes toujours confrontés à leur entreprise. Cependant, bien qu’ils rampent et se sabordent avec des jambes articulées comme le font les vertébrés comme nous, le plan corporel des arthropodes s’écarte énormément du nôtre.
Prenons seulement leur posture généralement étalée et le nombre élevé de jambes de marche qui affectent considérablement la façon dont ces créatures se déplacent. En conséquence, ils ont toujours plus de deux jambes au sol sur une large plage de vitesses de course offrant une stabilité statique élevée. Ces caractéristiques attirent l’attention des ingénieurs qui cherchent à construire des machines à jambes qui, un jour, surpasseront les dispositifs à roues sur des terrains accidentés et dangereux.

Il est de notoriété publique que, pour les vertébrés, les changements de démarche sont une caractéristique inhérente à la locomotion permettant une dépense d’énergie acceptable sur un large éventail de conditions au sol et de vitesses de course. Ainsi, différentes allures sont bien décrites et analysées chez les bipèdes tels que les hommes et les quadrupèdes tels que nos créatures émotionnellement les plus proches, comme les chevaux et les chiens domestiques. Ces changements de démarche sont principalement caractérisés par des changements dans la dynamique du corps, c’est-à-dire si et comment l’énergie de mouvement est temporairement stockée dans des structures élastiques, telles que le tendon d’Achille ou la voûte plantaire, et récupérée pour la foulée suivante.
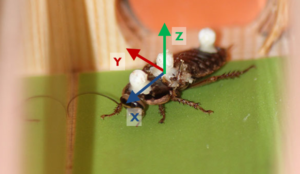
Pour les insectes à course rapide et malgré leur importance écologique et leur rôle de modèles biologiques pour les implémentations techniques, notre étude est la première portant sur les changements de démarche et l’impact du glissement sur leurs capacités de course. À cette fin, nous avons filmé les cafards à travers un canal étroit dont le sol était recouvert de papier de verre de tailles d’aspérité définies et filmé les courses avec une caméra à grande vitesse.
Avec notre approche expérimentale, nous avons pu démontrer que les insectes rapides adaptent leur démarche à mi-vitesse en ajustant leur schéma de coordination des jambes et leur dynamique corporelle. Pour le dire franchement, les animaux sont passés d’un équivalent à plusieurs pattes du trot Nauphoeta Slow (Fichier supplémentaire 2) avec des jeux de pattes strictement alternés à des vitesses intermédiaires, à une version à plusieurs pattes du tölt à des vitesses de course élevées Nauphoeta Fast (fichier supplémentaire 1). Alors que le trot se caractérise par des mouvements répétitifs de haut en bas du corps de l’animal, le tölt est une démarche pour laquelle les chevaux islandais sont réputés et qui permet des promenades particulièrement douces.
Dans le cas d’insectes qui courent avec jusqu’à 15 foulées par seconde, le changement de démarche peut également entraîner une stabilisation du regard qui, autrement, oscillerait à chaque pas entraînant une vision très floue.
Nous avons été particulièrement surpris de constater que la coordination ajustée des pattes se synchronise avec un déplacement des mécanismes qui stabilisent le mouvement des animaux. Ainsi, la démarche modifiée à grande vitesse et sur des surfaces glissantes s’est accompagnée d’un passage de la stabilisation statique à la stabilisation dynamique. Ce décalage minimise le besoin du système nerveux central de contrôler le mouvement tout en atteignant simultanément une efficacité énergétique élevée.
En conséquence, l’adaptation des schémas de coordination des jambes des robots à ceux des blattes à course rapide pourrait aider les robots à pédale à brûler de l’énergie plus efficacement, et donc à augmenter son endurance dans des environnements inhospitaliers. Nous espérons que nos recherches pourront aider à convaincre les ingénieurs qu’il ne suffit pas d’augmenter la fréquence de foulée pour augmenter la vitesse lorsque la dépense énergétique et la douceur de la conduite sont également des critères pertinents.