生物学上

昆虫とその親戚は、多くの陸生生態系における動物相バイオマスの大部分を提供しています。 彼らは人間の仕事や生活の場所を含むほぼすべての環境を移入するように、我々は常に自分の会社に直面しています。 しかし、私たちのような脊椎動物と同じように、彼らはクリープし、関節脚で約自沈しますが、節足動物の体の計画は私たちから途方もなく逸脱しています。
典型的には広大な姿勢と、これらの生き物の動きにかなり影響を与える歩行脚の数が多いだけを取りましょう。 結果としてそれらに高い静的な安定性を提供する連続した速度の広い範囲上の地面の2本以上の足が常にある。 これらの機能は、いつの日か、頑丈で危険な地形で車輪駆動装置を上回る脚付き機械を構築することを目指すエンジニアの注目を集めています。

脊椎動物にとって、歩行の変化は歩行運動の固有の特徴であり、広範囲の地面条件および走行速度にわたって許容可能なエネルギー消費を可能にす したがって、異なる歩行は、馬や家畜のような感情的に最も近い仲間の生き物のような男性や四足歩行などの二足歩行でよく記述され、分析されてい これらの歩行の変化は、主に身体の動態の変化によって特徴付けられる。 運動エネルギーがアキレス腱や足のアーチなどの弾性構造に一時的に保存され、次のストライドのために回復されるかどうか、そしてどのように。
高速走行昆虫のために、その生態学的重要性と技術的実装のための生物学的モデルとしての役割にもかかわらず、私たちは歩行の変化と滑りの走 そのために、私たちは、定義されたアスペリティサイズのサンドペーパーで床が並んでいた狭いチャネルを通ってゴキブリをshooedし、高速カメラでランをビ
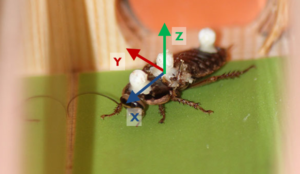
私たちの実験的なアプローチでは、高速実行昆虫は彼らの足の協調パターンと彼らの体のダイナミクスを調整することによって中速で彼らの歩行を適応させることを実証することができました。 それをまっすぐに置くために、動物は中間速度で足のセットを厳密に交互にするtrot Nautphoeta Slow(補足ファイル2)の複数の脚の同等物から、高い走行速度Nautphoeta Fast(補足ファイル1)でtöltの複数の脚のバージョンに切り替えた。 トロットは動物の体の繰り返しの上下の動きによって特徴付けられるが、töltはアイスランドの馬が有名であり、特に滑らかな乗り物を可能にする歩行である。
毎秒最大15歩で走る昆虫の場合、歩行シフトは視線の安定化にもつながり、それ以外の場合は各ステップで振動し、視力がひどくぼけます。
私たちは、調整された脚の調整が、動物の動きを安定させるメカニズムの変化と同期することに特に驚いていました。 したがって、高速および滑りやすい表面での修正された歩行は、静的安定化から動的安定化へのシフトを伴っていた。 この転位は同時に高エネルギーの効率を達成する間動きを制御する中枢神経系の必要性を最小にする。
したがって、ロボットの脚の協調パターンを高速走行ゴキブリのものに適応させることは、ポリペダルロボットがより効率的にエネルギーを燃焼させ、不人気な環境での耐久性を向上させるのに役立つ可能性がある。 私たちの研究は、エネルギー消費と乗り心地の滑らかさも関連する基準であるときに速度を上げるためにストライド周波数を上げるだけでは十分ではないことをエンジニアに納得させるのに役立つかもしれないことを願っています。