På Biologi

Insekter og deres slektninger utgjør en stor del av faunalbiomassen i mange terrestriske økosystemer. Som de fylle nesten alle miljøer, inkludert menneskelig arbeid og levende steder vi er alltid møtt med deres selskap. Men selv om de krype og kullboks om med artikulert ben akkurat som virveldyr som oss gjør, kroppen plan av leddyr avviker enormt fra vår.
La oss bare ta deres typisk sprawled holdning og det høye antallet gangben som betydelig påvirker måten disse skapningene beveger seg på. Som en konsekvens har de alltid mer enn to ben på bakken over et bredt spekter av løpehastigheter som gir høy statisk stabilitet. Disse funksjonene tiltrekker seg oppmerksomheten til ingeniører som tar sikte på å bygge legged maskiner som en dag skal overgå hjuldrevne enheter på robust og forrædersk terreng.

Det er allment kjent at for vertebrater er gangsendringer et iboende trekk ved lokomotiv som muliggjør akseptable energiforbruk over et bredt spekter av grunnforhold og kjørehastigheter. Dermed er forskjellige gangarter godt beskrevet og analysert i bipeder som menn og quadrupeds som våre følelsesmessig nærmeste medmennesker, som hester og husdyr. Disse gangforandringene er først og fremst preget av endringer i kroppsdynamikken, dvs. hvorvidt og hvordan bevegelsesenergi midlertidig lagres i elastiske strukturer, som Akillessenen eller fotbuen, og gjenvinnes for neste skritt.
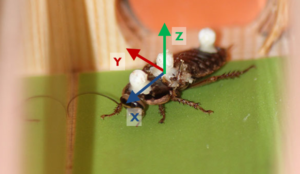
for rask kjører insekter og til tross for deres økologiske betydning og deres rolle som biologiske modeller for tekniske implementeringer, er vår første studie med fokus på gangart endringer og virkningen av slipperiness på deres kjører evner. Til det formål skutt vi kakerlakkene gjennom en smal kanal hvis gulv var foret med sandpapir av definerte asperity størrelser og filmet løpene med et høyhastighets kamera.
med vår eksperimentelle tilnærming var vi i stand til å demonstrere at raske løpende insekter tilpasser gangen i mid-speed ved å justere benkoordinasjonsmønsteret og kroppsdynamikken. For å si det rett, byttet dyrene fra en multi-legged ekvivalent av trav Nauphoeta Slow (Supplerende Fil 2) med strengt vekslende sett med ben ved mellomhastigheter, til en multi-legged versjon av tö ved høye kjørehastigheter Nauphoeta Fast (Supplerende Fil 1). Mens trav er preget av repeterende opp og ned bevegelser av dyrekroppen, er tö en gang som Islandshester er kjent for, og som muliggjør spesielt glatte rides.
ved insekter som går med opptil 15 skritt per sekund, kan gangskiftet også resultere i en stabilisering av blikket som ellers ville svinge med hvert trinn som resulterer i alvorlig sløret syn.
vi ble spesielt overrasket over at den justerte benkoordinasjonen synkroniseres med et skifte i mekanismene som stabiliserer dyrenes bevegelse. Dermed ble den modifiserte gangen med høy hastighet og på glatte overflater ledsaget av et skifte fra statisk til dynamisk stabilisering. Dette skiftet minimerer sentralnervesystemet behov for å kontrollere bevegelsen samtidig oppnå høy energieffektivitet.
følgelig kan tilpasning av koordinasjonsmønstre av robotben til de av hurtigløpende kakerlakker hjelpe poly-pedal roboter til å brenne energi mer effektivt, og dermed øke utholdenheten i ugjestmilde miljøer. Vi håper at vår forskning kan bidra til å overbevise ingeniører om at det ikke er nok å bare øke skrittfrekvensen for å øke hastigheten når energiforbruk og glatthet i turen også er relevante kriterier.