On Biology

Los insectos y sus parientes proporcionan una parte importante de la biomasa faunística en muchos ecosistemas terrestres. A medida que pueblan casi todos los entornos, incluidos el trabajo humano y los lugares de vida, siempre nos enfrentamos a su empresa. Sin embargo, a pesar de que se arrastran y se arrastran con las piernas articuladas al igual que los vertebrados como nosotros, el plan corporal de los artrópodos se desvía enormemente del nuestro.
Solo tomemos su postura típicamente tumbada y el alto número de piernas para caminar que afectan considerablemente la forma en que se mueven estas criaturas. Como consecuencia, siempre tienen más de dos patas en el suelo en un amplio rango de velocidades de carrera que proporcionan una alta estabilidad estática. Estas características atraen la atención de los ingenieros que buscan construir máquinas con patas que, un día, superen a los dispositivos impulsados por ruedas en terrenos accidentados y traicioneros.

Es de conocimiento común que, para los vertebrados, los cambios de marcha son una característica inherente de la locomoción, lo que permite un gasto de energía aceptable en una amplia gama de condiciones del suelo y velocidades de carrera. Por lo tanto, los diferentes modos de andar están bien descritos y analizados en bípedos como los hombres y cuadrúpedos como las criaturas más cercanas emocionalmente, como los caballos y los perros domésticos. Estos cambios de marcha se caracterizan principalmente por cambios en la dinámica corporal, p. ej. si, y cómo, la energía del movimiento se almacena temporalmente en estructuras elásticas, como el tendón de Aquiles o el arco del pie, y se recupera para la siguiente zancada.
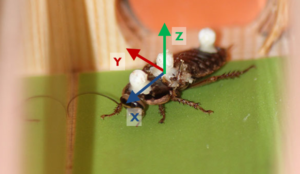
Para insectos que corren rápido y a pesar de su importancia ecológica y su papel como modelos biológicos para implementaciones técnicas, el nuestro es el primer estudio que se centra en los cambios de marcha y el impacto de la resbaladez en sus habilidades para correr. Para ello, rodamos a las cucarachas a través de un estrecho canal cuyo suelo estaba forrado con papel de lija de tamaños definidos de asperezas y grabamos las corridas con una cámara de alta velocidad.
Con nuestro enfoque experimental, pudimos demostrar que los insectos que corren rápido adaptan su marcha a velocidad media ajustando su patrón de coordinación de piernas y su dinámica corporal. Para ponerlo recto, los animales cambiaron de un equivalente de patas múltiples de trote Nauphoeta Lento (Archivo Suplementario 2) con conjuntos de patas estrictamente alternados a velocidades intermedias, a una versión de patas múltiples de tölt a altas velocidades de carrera Nauphoeta Rápido (Archivo Suplementario 1). Mientras que el trote se caracteriza por movimientos repetitivos hacia arriba y hacia abajo del cuerpo del animal, el tölt es un andar por el que los caballos islandeses son famosos y que permite paseos particularmente suaves.
En el caso de insectos que corren con hasta 15 pasos por segundo, el cambio de marcha también puede resultar en una estabilización de la mirada que de otro modo oscilaría con cada paso, lo que resulta en una visión severamente borrosa.
Nos sorprendió especialmente encontrar que la coordinación ajustada de las piernas se sincroniza con un cambio en los mecanismos que estabilizan el movimiento de los animales. Por lo tanto, la marcha modificada a alta velocidad y en superficies resbaladizas fue acompañada por un cambio de estabilización estática a dinámica. Este cambio minimiza la necesidad del sistema nervioso central de controlar el movimiento y, al mismo tiempo, logra una alta eficiencia energética.
En consecuencia, la adaptación de los patrones de coordinación de las patas de los robots a los de las cucarachas de carrera rápida podría ayudar a los robots polideportivos a quemar energía de manera más eficiente y, por lo tanto, aumentar su resistencia en entornos inhóspitos. Esperamos que nuestra investigación pueda ayudar a convencer a los ingenieros de que no es suficiente aumentar la frecuencia de zancada para aumentar la velocidad cuando el gasto de energía y la suavidad de la marcha también son criterios relevantes.