biologiassa

hyönteiset ja niiden sukulaiset tuottavat suuren osan faunaalibiomassasta monissa maaekosysteemeissä. Koska ne kansoittavat lähes kaikki ympäristöt, mukaan lukien ihmisen työ ja asuinpaikat, olemme aina heidän yrityksensä edessä. Mutta vaikka ne hiippailevat ja kipittävät nivelletyillä jaloilla aivan kuten selkärankaiset kuten me, niveljalkaisten ruumiinrakenne poikkeaa suunnattomasti omastamme.
otetaan vain niiden tyypillisesti rönsyilevä asento ja kävelevien jalkojen suuri määrä, jotka vaikuttavat oleellisesti näiden olentojen liikkumistapaan. Tämän seurauksena niillä on aina enemmän kuin kaksi jalkaa maassa monenlaisilla juoksunopeuksilla, jotka tarjoavat suuren staattisen vakauden. Nämä ominaisuudet kiinnittävät insinöörien huomion, joiden tavoitteena on rakentaa jalkaisia koneita, joiden on jonain päivänä päihitettävä pyöräkäyttöiset laitteet karussa ja vaarallisessa maastossa.

on yleisesti tiedossa, että selkärankaisilla, kävelyn muutokset ovat luontainen piirre liikkumiseen mahdollistaa hyväksyttävän energian kulut yli monenlaisia maanpinnan olosuhteissa ja juoksunopeudet. Niinpä erilaiset säärystimet kuvataan ja analysoidaan hyvin kaksijalkaisilla, kuten miehillä ja nelijalkaisilla, kuten tunnetasolla läheisimmillä kanssaeläjillämme, kuten hevosilla ja kotikoirilla. Näille kävelymuutoksille ovat tyypillisiä ennen kaikkea muutokset kehon dynamiikassa, ts. varastoidaanko ja miten liike-energia väliaikaisesti elastisiin rakenteisiin, kuten akillesjänteeseen tai jalkakaareen, ja otetaan talteen seuraavaa askelta varten.
nopeajuoksuisille hyönteisille ja huolimatta niiden ekologisesta merkityksestä ja roolista teknisten toteutusten biologisina malleina, meidän tutkimuksemme on ensimmäinen, joka keskittyy kävelyn muutoksiin ja liukkauden vaikutukseen niiden juoksukykyyn. Sitä varten ammuimme torakoita kapealla kanavalla, jonka lattia oli vuorattu tarkoin määritellyllä hiekkapaperilla, ja kuvasimme juoksut suurnopeuskameralla.
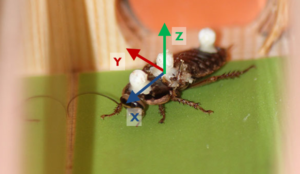
kokeellisella lähestymistavallamme pystyimme osoittamaan, että nopeasti juoksevat hyönteiset mukauttavat kävelyään keskivauhdilla säätämällä jalkojen koordinaatiokuviota ja kehon dynamiikkaa. Suoraan sanottuna Eläimet vaihtoivat monijalkaisesta vastaavasta Trot Nauphoeta hidas (Supplementary File 2) tiukasti vuorotellen sarjaa jalat väli nopeuksilla, monijalkainen versio tölt suurilla juoksunopeuksilla Nauphoeta Fast (Supplementary File 1). Siinä missä raville on tyypillistä eläinten kehon toistuvat ylös-ja alas-liikkeet, tölt on islanninhevosten suosima kävely, joka mahdollistaa erityisen sujuvat ajot.
niiden hyönteisten tapauksessa, jotka juoksevat jopa 15 askelta sekunnissa, kävelynsiirto voi myös vakauttaa katsetta, joka muuten värähtelisi jokaisen askeleen myötä ja aiheuttaisi vakavan näön hämärtymisen.
olimme erityisen yllättyneitä huomatessamme, että säädetyn jalan koordinaatio synkronoituu niiden mekanismien muutoksen kanssa, jotka vakauttavat eläinten liikettä. Niinpä modifioituun kävelyyn suurella nopeudella ja liukkailla pinnoilla liittyi siirtyminen staattisesta dynaamiseen vakauttamiseen. Tämä muutos minimoi keskushermoston tarpeen hallita liikettä samalla kun saavutetaan korkea energiatehokkuus.
vastaavasti robottijalkojen koordinaatiomallien Mukauttaminen nopeasti juoksevien torakoiden koordinaatiomalleihin voisi auttaa polypoljinrobotteja polttamaan energiaa tehokkaammin ja siten lisäämään sen kestävyyttä karuissa ympäristöissä. Toivomme, että tutkimuksemme voi auttaa vakuuttamaan insinöörit siitä, että ei riitä, että vain lisätään askeltiheyttä nopeuden lisäämiseksi, kun myös energiankulutus ja ajon sujuvuus ovat olennaisia kriteerejä.