a biológián

rovarok és rokonaik biztosítják a fauna biomasszájának jelentős részét számos szárazföldi ökoszisztémában. Mivel szinte minden környezetben laknak, beleértve az emberi munkát és az élő helyeket, mindig szembesülünk a társaságukkal. Bár csuklós lábakkal kúsznak és mászkálnak, mint a hozzánk hasonló gerincesek, az ízeltlábúak testterve óriási mértékben eltér a miénktől.
vegyük csak a tipikusan szétterjedt testtartásukat és a járólábak nagy számát, amelyek jelentősen befolyásolják ezeknek a lényeknek a mozgását. Ennek következtében a futási sebességek széles tartományában mindig kettőnél több lábuk van a földön, nagy statikus stabilitást biztosítva. Ezek a tulajdonságok vonzzák a mérnökök figyelmét, akik olyan lábú gépeket kívánnak építeni, amelyek egy napon felülmúlják a kerék meghajtású eszközöket robusztus és alattomos terepen.

köztudott, hogy a gerincesek számára a járásváltozás a mozgás velejárója, amely elfogadható energiafelhasználást tesz lehetővé a talajviszonyok és a futási sebesség széles skáláján. Így a különböző járásokat jól leírják és elemzik a kétlábúaknál, például a férfiaknál és a négylábúaknál, például érzelmileg legközelebbi társainknál, mint a lovak és a házi kutyák. Ezeket a járásváltozásokat elsősorban a test dinamikájának változásai jellemzik, pl. függetlenül attól, hogy a mozgási energia ideiglenesen tárolódik-e rugalmas struktúrákban, például az Achilles-ínben vagy a láb ívében, és a következő lépéshez visszanyeri-e.
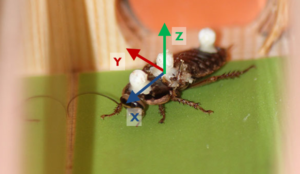
a gyorsan futó rovarok ökológiai jelentősége és a technikai megvalósítások biológiai modelljeként betöltött szerepük ellenére a mi tanulmányunk az első, amely a járásváltozásokra és a csúszósságnak a futási képességeikre gyakorolt hatására összpontosít. Ebből a célból a csótányokat egy keskeny csatornán keresztül forgattuk, amelynek padlója meghatározott méretű csiszolópapírral volt bélelve, és nagysebességű kamerával videóra vettük a futásokat.
kísérleti megközelítésünkkel be tudtuk bizonyítani, hogy a gyorsan futó rovarok a láb koordinációs mintázatának és a test dinamikájának beállításával alkalmazkodnak a járásukhoz középsebességnél. Egyenesen fogalmazva, az állatok a trot Nauphoeta Slow többlábú megfelelőjéről (2. Kiegészítő Fájl) váltottak, szigorúan váltakozó lábkészlettel, közepes sebességgel, a T 6LT többlábú változatára, nagy futási sebességgel Nauphoeta Fast (1.Kiegészítő Fájl). Míg az ügetést az állatok testének ismétlődő fel-le mozgása jellemzi, a T 6 l egy olyan járás, amelyről az izlandi lovak híresek, és amely különösen sima lovaglást tesz lehetővé.
olyan rovarok esetében, amelyek másodpercenként akár 15 lépéssel is futnak, a járásváltás a tekintet stabilizálódását is eredményezheti, amely egyébként minden lépéssel oszcillálna, ami súlyosan homályos látást eredményez.
különösen meglepődve tapasztaltuk, hogy a korrigált láb koordináció szinkronban van az állatok mozgását stabilizáló mechanizmusok eltolódásával. Így a módosított járást nagy sebességgel és csúszós felületeken a statikusról a dinamikus stabilizációra való áttérés kísérte. Ez a váltás minimalizálja a központi idegrendszernek a mozgás irányításának szükségességét, miközben egyidejűleg magas energiahatékonyságot ér el.
ennek megfelelően a robotlábak koordinációs mintáinak a gyorsan futó csótányokéhoz való igazítása segíthet a poli-pedálos robotoknak abban, hogy hatékonyabban égessék el az energiát, és ezáltal növeljék az állóképességet a barátságtalan környezetben. Reméljük, hogy kutatásunk segíthet meggyőzni a mérnököket arról, hogy nem elég csak a lépés gyakoriságát növelni a sebesség növelése érdekében, amikor az energiaköltség és a menet simasága is releváns kritérium.