Sulla biologia

Gli insetti e i loro parenti forniscono una parte importante della biomassa faunistica in molti ecosistemi terrestri. Poiché popolano quasi tutti gli ambienti, inclusi il lavoro umano e i luoghi di vita, siamo sempre di fronte alla loro compagnia. Tuttavia, anche se strisciano e affondano con le gambe articolate proprio come fanno i vertebrati come noi, il piano corporeo degli artropodi si discosta enormemente dal nostro.
Prendiamo solo la loro postura tipicamente distesa e l’alto numero di gambe che camminano che influenzano considerevolmente il modo in cui queste creature si muovono. Di conseguenza hanno sempre più di due gambe a terra su una vasta gamma di velocità di marcia che forniscono un’elevata stabilità statica. Queste caratteristiche attirano l’attenzione degli ingegneri che mirano a costruire macchine a gambe che, un giorno, supereranno i dispositivi azionati da ruote su terreni accidentati e insidiosi.

È risaputo che, per i vertebrati, i cambiamenti dell’andatura sono una caratteristica intrinseca della locomozione che consente un dispendio energetico accettabile su un’ampia gamma di condizioni del terreno e velocità di marcia. Quindi, diverse andature sono ben descritte e analizzate in bipedi come uomini e quadrupedi come i nostri simili emotivamente più vicini, come cavalli e cani domestici. Questi cambiamenti dell’andatura sono principalmente caratterizzati da cambiamenti nella dinamica del corpo, cioè se e come l’energia del movimento viene temporaneamente immagazzinata in strutture elastiche, come il tendine di Achille o l’arco del piede, e recuperata per il passo successivo.
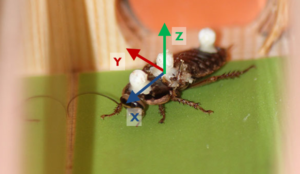
Per gli insetti che corrono velocemente e nonostante la loro importanza ecologica e il loro ruolo di modelli biologici per implementazioni tecniche, il nostro è il primo studio incentrato sui cambiamenti dell’andatura e sull’impatto della scivolosità sulle loro capacità di corsa. A tal fine abbiamo girato gli scarafaggi attraverso uno stretto canale il cui pavimento era rivestito con carta vetrata di dimensioni definite di asperità e abbiamo filmato le corse con una telecamera ad alta velocità.
Con il nostro approccio sperimentale siamo stati in grado di dimostrare che gli insetti che corrono veloci adattano la loro andatura a metà velocità regolando il loro modello di coordinazione delle gambe e la loro dinamica corporea. Per dirla direttamente, gli animali sono passati da un equivalente a più zampe di trotto Nauphoeta Lento (File supplementare 2) con serie di zampe rigorosamente alternate a velocità intermedie, a una versione a più gambe di tölt ad alte velocità di corsa Nauphoeta Veloce (File supplementare 1). Mentre il trotto è caratterizzato da movimenti ripetitivi su e giù del corpo degli animali, il tölt è un’andatura per cui i cavalli islandesi sono famosi e che consente corse particolarmente fluide.
Nel caso di insetti che corrono fino a 15 passi al secondo lo spostamento dell’andatura può comportare anche una stabilizzazione dello sguardo che altrimenti oscillerebbe ad ogni passo con conseguente visione gravemente offuscata.
Siamo rimasti particolarmente sorpresi nel scoprire che la coordinazione delle gambe regolata si sincronizza con uno spostamento dei meccanismi che stabilizzano il movimento degli animali. Pertanto, l’andatura modificata ad alta velocità e su superfici scivolose è stata accompagnata da uno spostamento dalla stabilizzazione statica a quella dinamica. Questo spostamento riduce al minimo la necessità del sistema nervoso centrale di controllare il movimento e contemporaneamente raggiungere un’elevata efficienza energetica.
Di conseguenza, adattare i modelli di coordinazione delle gambe del robot a quelli degli scarafaggi veloci potrebbe aiutare i robot poli-pedale a bruciare energia in modo più efficiente, e quindi aumentare la sua resistenza in ambienti inospitali. Speriamo che la nostra ricerca possa aiutare a convincere gli ingegneri che non è sufficiente aumentare solo la frequenza del passo per aumentare la velocità quando anche il dispendio energetico e la scorrevolezza della corsa sono criteri rilevanti.