On Biology

Insekten und ihre Verwandten stellen einen großen Teil der faunalen Biomasse in vielen terrestrischen Ökosystemen. Da sie fast alle Umgebungen bevölkern, einschließlich menschlicher Arbeits- und Wohnorte, sind wir immer mit ihrer Gesellschaft konfrontiert. Obwohl sie mit gelenkigen Beinen herumkriechen und herumschwirren, genau wie Wirbeltiere wie wir, weicht der Körperplan der Arthropoden enorm von unserem ab.
Nehmen wir nur ihre typisch ausgedehnte Haltung und die hohe Anzahl von Gehbeinen, die die Art und Weise, wie sich diese Kreaturen bewegen, erheblich beeinflussen. Als Konsequenz haben sie immer mehr als zwei Beine auf dem Boden über einen weiten Bereich von Laufgeschwindigkeiten, die eine hohe statische Stabilität bieten. Diese Merkmale ziehen die Aufmerksamkeit von Ingenieuren auf sich, die Legged-Maschinen bauen wollen, die eines Tages radgetriebene Geräte in rauem und tückischem Gelände übertreffen sollen.

Es ist allgemein bekannt, dass Gangänderungen für Wirbeltiere ein inhärentes Merkmal der Fortbewegung sind und einen akzeptablen Energieverbrauch über einen weiten Bereich von Bodenbedingungen und Laufgeschwindigkeiten ermöglichen. So werden verschiedene Gangarten bei Zweibeinern wie Männern und Vierbeinern wie unseren emotional engsten Mitmenschen wie Pferden und Haushunden gut beschrieben und analysiert. Diese Gangveränderungen sind in erster Linie durch Veränderungen der Körperdynamik gekennzeichnet, d.h. ob und wie Bewegungsenergie in elastischen Strukturen wie der Achillessehne oder dem Fußgewölbe zwischengespeichert und für den nächsten Schritt wiedergewonnen wird.
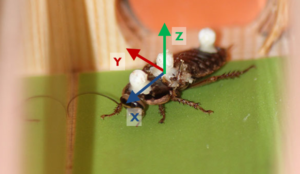
Für schnell laufende Insekten und trotz ihrer ökologischen Bedeutung und ihrer Rolle als biologische Modelle für technische Implementierungen ist unsere die erste Studie, die sich auf Gangänderungen und den Einfluss von Rutschigkeit auf ihre Lauffähigkeiten konzentriert. Dazu schoben wir die Kakerlaken durch einen schmalen Kanal, dessen Boden mit Sandpapier definierter Asperitäts-Größe ausgekleidet war und filmten die Läufe mit einer Hochgeschwindigkeitskamera.
Mit unserem experimentellen Ansatz konnten wir zeigen, dass schnell laufende Insekten ihren Gang bei mittlerer Geschwindigkeit anpassen, indem sie ihr Beinkoordinationsmuster und ihre Körperdynamik anpassen. Um es klarzustellen, wechselten die Tiere von einem mehrbeinigen Äquivalent des Trabs Nauphoeta Slow (Ergänzungsdatei 2) mit streng abwechselnden Beinsätzen bei mittleren Geschwindigkeiten zu einer mehrbeinigen Version von Tölt bei hohen Laufgeschwindigkeiten Nauphoeta Fast (Ergänzungsdatei 1). Während Trab sich durch repetitive Auf- und Abbewegungen des Tierkörpers auszeichnet, ist Tölt eine Gangart, für die Islandpferde berühmt sind und die besonders sanfte Fahrten ermöglicht.
Bei Insekten, die mit bis zu 15 Schritten pro Sekunde laufen, kann die Gangverschiebung auch zu einer Stabilisierung des Blicks führen, der sonst mit jedem Schritt oszillieren würde, was zu stark verschwommenem Sehen führt.
Wir waren besonders überrascht, dass die angepasste Beinkoordination mit einer Verschiebung der Mechanismen synchronisiert ist, die die Bewegung der Tiere stabilisieren. So wurde der modifizierte Gang bei hoher Geschwindigkeit und auf rutschigem Untergrund von einer Verschiebung von statischer zu dynamischer Stabilisierung begleitet. Diese Verschiebung minimiert die Notwendigkeit des Zentralnervensystems, die Bewegung zu steuern und gleichzeitig eine hohe Energieeffizienz zu erreichen.
Dementsprechend könnte die Anpassung der Koordinationsmuster von Roboterbeinen an die von schnell laufenden Robotern dazu beitragen, dass Polypedalroboter Energie effizienter verbrennen und somit ihre Ausdauer in unwirtlichen Umgebungen erhöhen. Wir hoffen, dass unsere Forschung dazu beitragen kann, die Ingenieure davon zu überzeugen, dass es nicht ausreicht, nur die Schrittfrequenz zu erhöhen, um die Geschwindigkeit zu erhöhen, wenn auch der Energieverbrauch und die Laufruhe relevante Kriterien sind.