o biologii

owady i ich krewni stanowią znaczną część biomasy fauny w wielu ekosystemach lądowych. Ponieważ zaludniają prawie wszystkie środowiska, w tym pracę ludzką i miejsca życia, zawsze mamy do czynienia z ich towarzystwem. Jednak, choć pełzają i tracą z przegubowymi nogami, tak jak robią to kręgowce takie jak my, plan ciała stawonogów ogromnie odbiega od naszego.
weźmy tylko ich typowo rozłożoną postawę i dużą liczbę chodzących nóg, które znacząco wpływają na sposób poruszania się tych stworzeń. W rezultacie mają zawsze więcej niż dwie nogi na ziemi w szerokim zakresie prędkości jazdy, zapewniając wysoką stabilność statyczną. Cechy te przykuwają uwagę inżynierów dążących do konstruowania maszyn, które pewnego dnia będą przewyższać urządzenia napędzane kołami na trudnym i zdradliwym terenie.

powszechnie wiadomo, że dla kręgowców zmiany chodu są nieodłączną cechą ruchu umożliwiającą akceptowalny wydatek energii w szerokim zakresie warunków gruntowych i prędkości biegu. Tak więc różne chody są dobrze opisane i przeanalizowane u dwunożnych, takich jak mężczyźni i czworonogi, takie jak nasi emocjonalnie najbliżsi bliźni, jak konie i psy domowe. Te zmiany chodu charakteryzują się przede wszystkim zmianami dynamiki ciała, tj. czy i w jaki sposób energia ruchu jest tymczasowo magazynowana w elastycznych strukturach, takich jak ścięgno Achillesa lub łuk stopy, i odzyskiwana do następnego kroku.
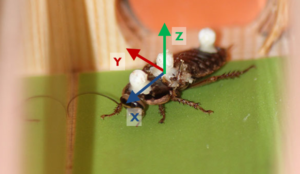
dla owadów szybko biegających i pomimo ich znaczenia ekologicznego i roli jako modeli biologicznych w zastosowaniach technicznych, nasze badania koncentrują się na zmianach chodu i wpływie śliskości na ich zdolności biegowe. W tym celu strzelaliśmy do karaluchów przez wąski kanał, którego podłoga była wyłożona papierem ściernym o określonych rozmiarach i nagrywaliśmy trasy za pomocą szybkiej kamery.
dzięki naszemu eksperymentalnemu podejściu byliśmy w stanie wykazać, że szybko biegające owady dostosowują swój chód w połowie prędkości, dostosowując wzór koordynacji nóg i dynamikę ciała. Mówiąc wprost, zwierzęta przestawiły się z wielonożnego odpowiednika kłusa Nauphoeta Slow (plik uzupełniający 2) ze ściśle zmiennymi zestawami nóg przy średnich prędkościach, na wielonożną wersję tölta przy dużych prędkościach biegowych Nauphoeta Fast (plik uzupełniający 1). Podczas gdy kłus charakteryzuje się powtarzalnymi ruchami ciała zwierząt w górę iw dół, tölt jest chodem, z którego słyną Islandzkie konie i który umożliwia szczególnie płynną jazdę.
w przypadku owadów, które biegną z prędkością do 15 kroków na sekundę, przesunięcie chodu może również skutkować stabilizacją spojrzenia, które w przeciwnym razie oscylowałoby z każdym krokiem, powodując poważne niewyraźne widzenie.
byliśmy szczególnie zaskoczeni, gdy okazało się, że skorygowana koordynacja nóg synchronizuje się z przesunięciem mechanizmów stabilizujących ruch zwierząt. Tak więc zmodyfikowanemu chódowi przy dużych prędkościach i na śliskich nawierzchniach towarzyszyło przejście od stabilizacji statycznej do dynamicznej. To przesunięcie minimalizuje potrzebę kontrolowania ruchu przez centralny układ nerwowy, jednocześnie osiągając wysoką wydajność energetyczną.
w związku z tym dostosowanie wzorców koordynacji nóg robota do wzorców szybko biegających karaluchów może pomóc robotom z wieloma pedałami wydajniej spalać energię, a tym samym zwiększyć jej wytrzymałość w nieprzyjaznym środowisku. Mamy nadzieję, że nasze badania mogą pomóc przekonać inżynierów, że nie wystarczy tylko zwiększyć częstotliwość kroku, aby zwiększyć prędkość, gdy wydatek energii i płynność jazdy są również istotnymi kryteriami.