Em Biologia

Insetos e seus familiares fornecem a maior parte da biomassa de espécies silvestres em muitos ecossistemas terrestres. Como eles povoam quase todos os ambientes, incluindo o trabalho humano e locais de vida, estamos sempre confrontados com a sua empresa. No entanto, apesar de rastejarem com pernas articuladas, tal como vertebrados como nós, o plano corporal dos artrópodes afasta-se tremendamente do nosso.
tomemos apenas a sua postura tipicamente inclinada e o elevado número de pernas andantes que afectam consideravelmente a forma como estas criaturas se movem. Como consequência, eles sempre têm mais de duas pernas no solo sobre uma ampla gama de velocidades de execução, proporcionando alta estabilidade estática. Estas características atraem a atenção dos engenheiros com o objetivo de construir máquinas legged que, um dia, superarão o desempenho de dispositivos rodados em terreno acidentado e traiçoeiro.

é do conhecimento geral que, para os vertebrados, as mudanças de marcha são uma característica inerente à locomoção que permite uma despesa de energia aceitável ao longo de uma ampla gama de condições de solo e velocidades de circulação. Assim, diferentes gaits são bem descritos e analisados em bípedes, tais como homens e quadrúpedes, tais como as nossas criaturas emocionalmente mais próximas, como cavalos e cães domésticos. Estas mudanças de marcha são principalmente caracterizadas por mudanças na dinâmica do corpo, i.e. se e como a energia do movimento é temporariamente armazenada em estruturas elásticas, como o tendão de Aquiles ou o arco do pé, e recuperado para a próxima etapa.
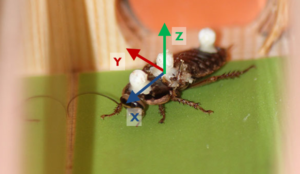
para insetos de corrida rápida e apesar de sua importância ecológica e seu papel como modelos biológicos para implementações técnicas, o nosso é o primeiro estudo focando em mudanças de marcha e o impacto do deslizamento em suas habilidades de corrida. Para esse fim, atiramos as baratas através de um canal estreito cujo chão estava forrado com lixa de tamanhos definidos de asperidade e filmamos as corridas com uma câmera de alta velocidade.
com a nossa abordagem experimental fomos capazes de demonstrar que os insectos de corrida rápida adaptam o seu andar a meio da velocidade ajustando o seu padrão de coordenação das pernas e a sua dinâmica corporal. Para colocá-lo em linha reta, os animais mudaram de um equivalente multi-legged de trot Nauphoeta Slow (arquivo suplementar 2) com conjuntos estritamente alternando de pernas em velocidades intermediárias, para uma versão multi-legged de tölt em altas velocidades de corrida Nauphoeta Fast (arquivo suplementar 1). Enquanto o trot é caracterizado por movimentos repetitivos para cima e para baixo do corpo dos animais, o tölt é uma marcha pela qual os cavalos islandeses são famosos e que permite passeios particularmente suaves.
no caso de insetos que correm com até 15 passos por segundo o deslocamento da marcha pode resultar também em uma estabilização do olhar que de outra forma oscilaria com cada passo resultando em visão severamente turva.Ficámos particularmente surpreendidos ao constatar que a coordenação da perna ajustada sincroniza-se com uma mudança nos mecanismos que estabilizam o movimento dos animais. Assim, o andar modificado em alta velocidade e em superfícies escorregadias foi acompanhado por uma mudança de estabilização estática para dinâmica. Esta mudança minimiza a necessidade do sistema nervoso central de controlar o movimento, ao mesmo tempo que atinge alta eficiência energética.
em conformidade, adaptar os padrões de coordenação das pernas de robô aos das baratas de corrida rápida poderia ajudar os robôs de pedal poli a queimar energia de forma mais eficiente, e, portanto, aumentar a sua resistência em ambientes inóspitos. Esperamos que a nossa investigação possa ajudar a convencer os engenheiros de que não é suficiente apenas aumentar a frequência de stride, a fim de aumentar a velocidade quando as despesas de energia e a suavidade do passeio são também critérios relevantes.