på biologi

insekter och deras släktingar utgör en stor del av faunal biomassa i många terrestriska ekosystem. Eftersom de befolkar nästan alla miljöer inklusive mänskligt arbete och levande platser står vi alltid inför deras företag. Men även om de kryper och scuttle om med ledade ben precis som ryggradsdjur som vi gör, avviker kroppsplanen för leddjur enormt från vår.
Låt oss bara ta sin typiskt sprawled hållning och det stora antalet gångben som väsentligt påverkar hur dessa varelser rör sig. Som en konsekvens har de alltid mer än två ben på marken över ett brett spektrum av körhastigheter som ger hög statisk stabilitet. Dessa funktioner lockar uppmärksamheten hos ingenjörer som syftar till att bygga benmaskiner som en dag ska överträffa hjuldrivna enheter på robust och förrädisk terräng.

det är allmänt känt att för ryggradsdjur är gångförändringar ett inneboende inslag i rörelse som möjliggör acceptabla energiförbrukning över ett brett spektrum av markförhållanden och körhastigheter. Således är olika gångarter väl beskrivna och analyserade i bipeds som män och quadrupeds som våra känslomässigt närmaste medvarelser, som hästar och tamhundar. Dessa gångförändringar kännetecknas främst av förändringar i kroppsdynamiken, dvs. huruvida och hur rörelseenergi lagras tillfälligt i elastiska strukturer, såsom akillessenen eller fotbågen, och återvinns för nästa steg.
för snabblöpande insekter och trots deras ekologiska betydelse och deras roll som biologiska modeller för tekniska implementeringar är vår den första studien som fokuserar på gångförändringar och påverkan av slipperiness på deras körförmåga. För detta ändamål shooed vi kackerlackorna genom en smal kanal vars golv var fodrad med sandpapper av definierade asperity storlekar och filmade körningarna med en höghastighetskamera.
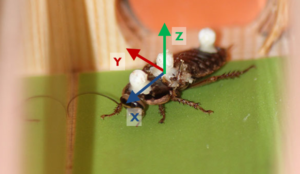
med vårt experimentella tillvägagångssätt kunde vi visa att snabba löpande insekter anpassar sin gång i medelhastighet genom att justera benkoordineringsmönstret och deras kroppsdynamik. För att uttrycka det rakt bytte djuren från en flerbent ekvivalent av trav Nauphoeta Slow (kompletterande Fil 2) med strikt växlande uppsättningar ben vid mellanhastigheter, till en flerbenad version av T acguillt vid höga körhastigheter Nauphoeta Fast (kompletterande fil 1). Medan trav kännetecknas av repetitiva upp-och nedrörelser i djurkroppen, är t excepllt en gång som Islandshästar är kända för och som möjliggör särskilt smidiga åkattraktioner.
när det gäller insekter som löper med upp till 15 steg per sekund kan gångskiftet också resultera i en stabilisering av blicken som annars skulle svänga med varje steg vilket resulterar i allvarligt suddig syn.
vi blev särskilt förvånade över att finna att den justerade benkoordinationen synkroniseras med en förändring i mekanismerna som stabiliserar djurens rörelse. Således åtföljdes den modifierade gången med hög hastighet och på hala ytor av ett skifte från statisk till dynamisk stabilisering. Detta skifte minimerar det centrala nervsystemets behov av att kontrollera rörelsen samtidigt som man uppnår hög energieffektivitet.
följaktligen kan anpassning av koordinationsmönstren för robotben till de av snabbkörande kackerlackor hjälpa poly-pedalrobotar att bränna energi mer effektivt och därmed öka uthålligheten i ogästvänliga miljöer. Vi hoppas att vår forskning kan bidra till att övertyga ingenjörer att det inte räcker med att bara öka stegfrekvensen för att öka hastigheten när energiförbrukning och jämnhet i resan också är relevanta kriterier.