大学物理学:OpenStax
平衡を達成するために必要な最初の条件は、すでに述べたものです:システム上の正味の外力はゼロでなければなりません。 方程式として表され、これは単純に
正味の\boldsymbol{F}がゼロの場合、任意の方向の正味の外力はゼロであることに注意してください。 たとえば、標準的なx軸とy軸に沿った正味の外力はゼロです。 これは、
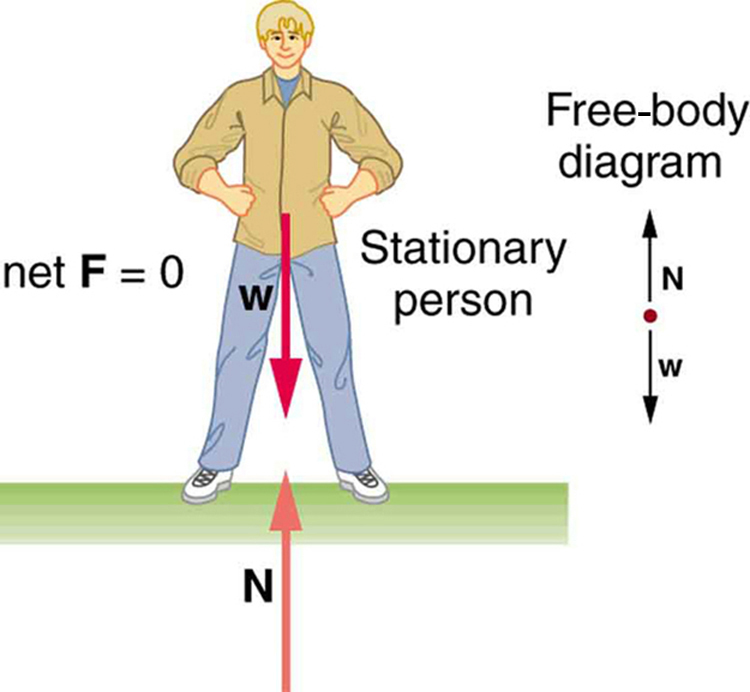
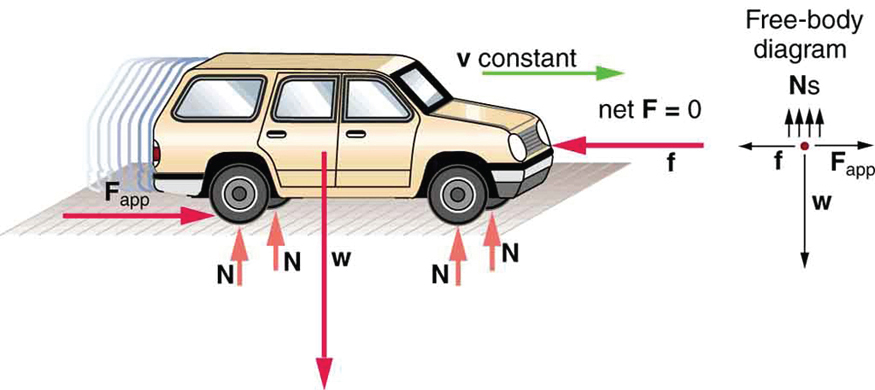
図1と図2は、静的平衡(動かない)と動的平衡(一定速度)の両方に対して\boldsymbol{\textbf{net}f=0}の状況を示しています。
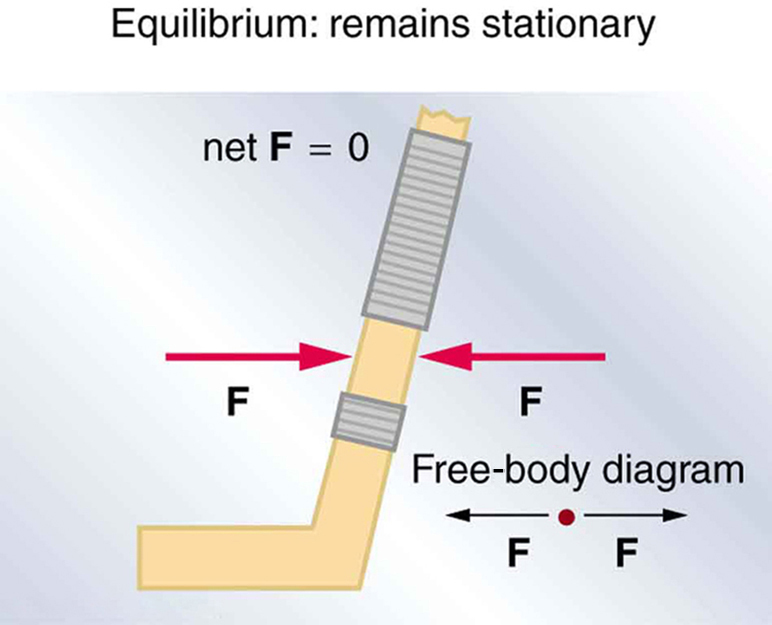
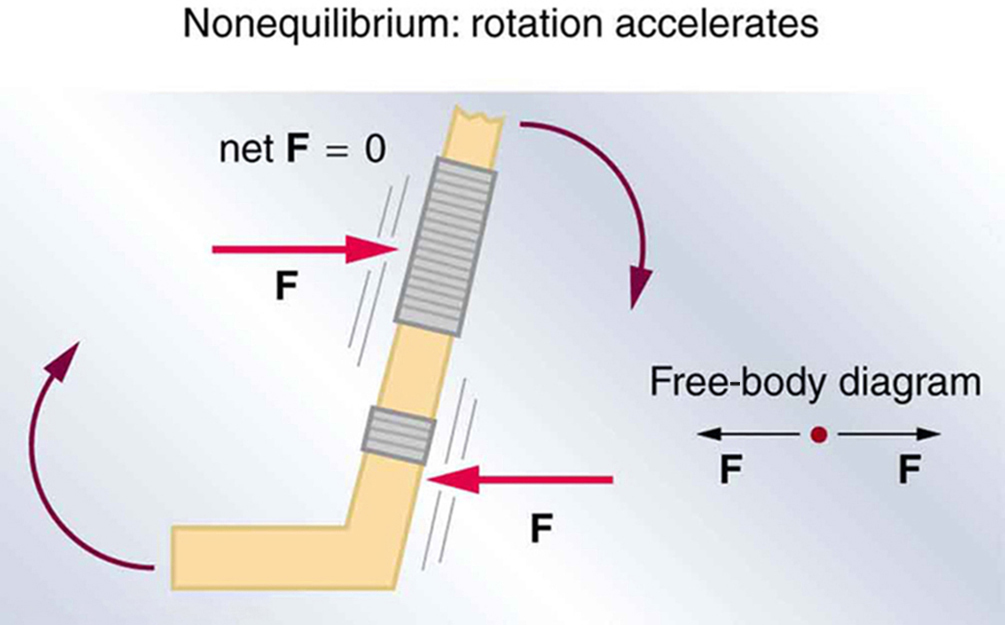
しかし、システムが平衡状態にあるためには、システムの正味の外力がゼロであるだけでは十分ではありません。 氷の上に平らに横たわっているアイスホッケーの棒に力が加えられる図3と図4に示す2つの状況を考えてみましょう。 図に示されている両方の状況で正味の外力はゼロですが、一方の場合は平衡が達成されますが、他方の場合はそうではありません。 図3では、アイスホッケーの棒は動かないままです。 しかし、図4では、異なる場所に同じ力が加えられていると、スティックは加速された回転を経験します。 したがって、力が加えられる点は、平衡が達成されるかどうかを決定する別の要因であることがわかっています。 これは、次のセクションでさらに検討されます。
PHET探索:TORQUE
トルクが物体を回転させる方法を調査します。 角加速度、慣性モーメント、角運動量、トルクの関係を発見します。
- 静力学は、平衡状態の力の研究です。
- 平衡を達成するには二つの条件を満たさなければならず、これは線形または回転加速度のない運動であると定義されています。
- 平衡を達成するために必要な最初の条件は、システム上の正味の外力がゼロでなければならず、\boldsymbol{\textbf{net}F=0}でなければならないということです。
概念的な質問
1: あなたは動的平衡にある移動体の速度について何を言うことができますか? 身体上のすべての外力を表すために、明確に標識された矢印を使用して、そのような身体のスケッチを描きます。
2: どのような条件の下で回転体が平衡になることができますか? 例を挙げてみましょう。
用語集
静的平衡系に作用する正味の外力とトルクがゼロである平衡状態動的平衡一定速度で動く系の正味の外力とトルクがゼロである平衡状態