대학 물리학:오픈 팩스
평형을 달성하는 데 필요한 첫 번째 조건은 이미 언급 한 것입니다:시스템의 순 외력은 0 이어야합니다. 방정식으로 표현,이 단순히
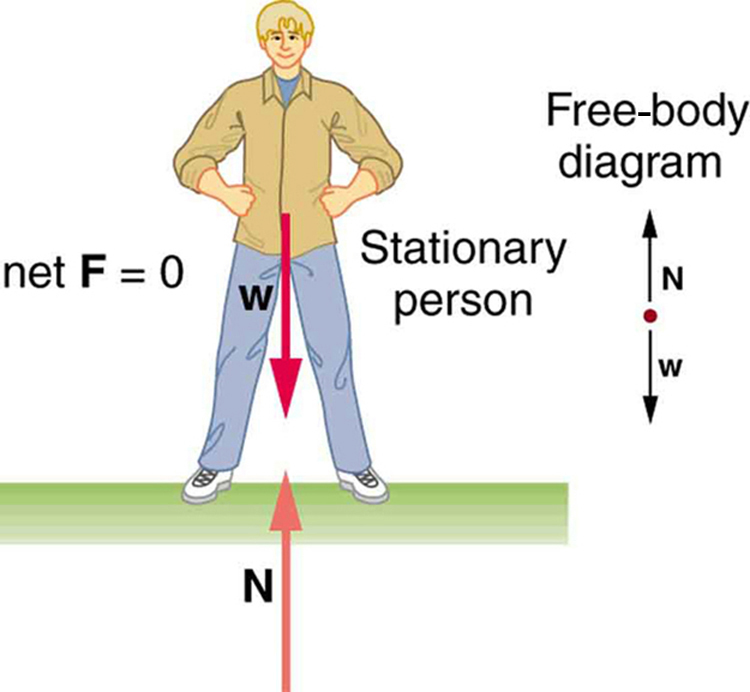
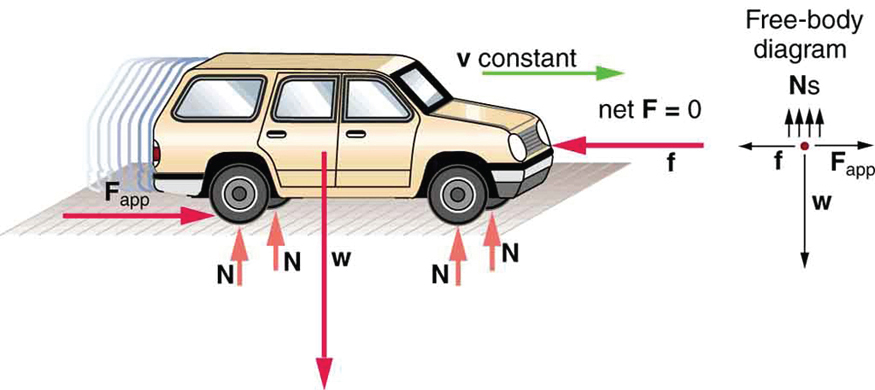
만약 순\굵은 기호{에프}이 0 이면 어떤 방향 으로든 순 외력은 0 입니다. 예를 들어,일반적인 순 외부 힘 엑스-과 와이-축은 0 입니다. 그림 1 과 그림 2 는 정적 평형(움직이지 않는)과 동적 평형(일정한 속도)모두에 대해 볼드 기호가 존재하는 상황을 보여줍니다.
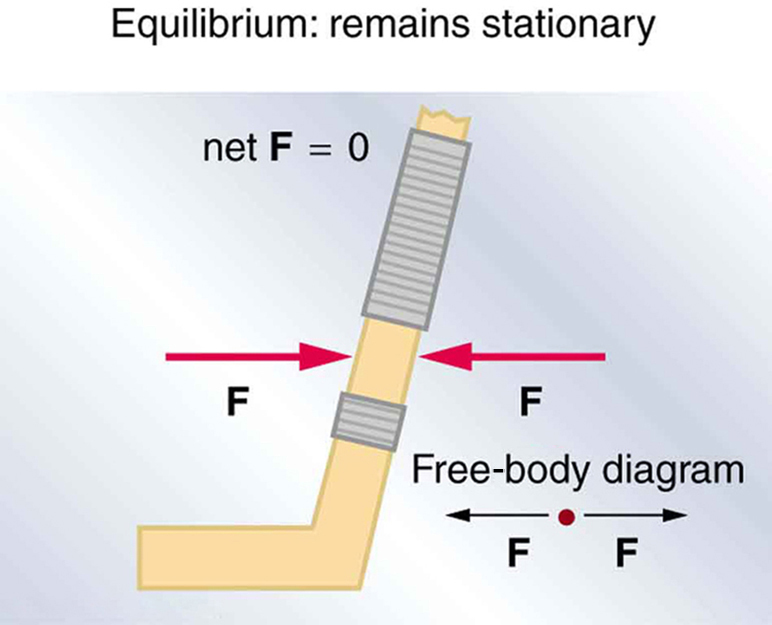
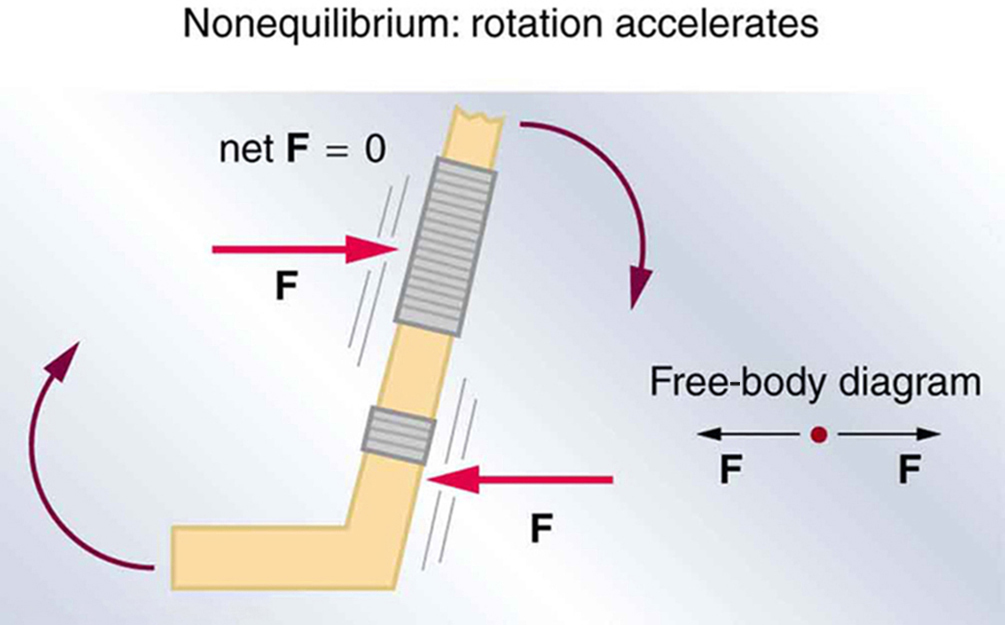
그러나 시스템의 순 외력이 시스템이 평형을 이루기 위해서는 0 이 되는 것만으로는 충분하지 않다. 그림 3 과 그림 4 에 나와있는 두 가지 상황을 고려해 볼 때 얼음 위에 평평하게 놓인 아이스 하키 스틱에 힘이 가해집니다. 순 외력은 그림에 표시된 두 상황 모두에서 0 이지만 한 경우에는 평형이 달성되는 반면 다른 경우에는 그렇지 않습니다. 그림 3 에서 아이스 하키 스틱은 움직이지 않습니다. 그러나 그림 4 에서 동일한 힘이 다른 장소에 적용되면 스틱은 가속 회전을 경험합니다. 따라서 우리는 힘이 가해지는 지점이 평형 달성 여부를 결정하는 또 다른 요소라는 것을 알고 있습니다. 이것은 다음 섹션에서 더 탐구 될 것입니다.
토크
토크로 인해 물체가 어떻게 회전하는지 조사합니다. 각가속도,관성 모멘트,각운동량 및 토크 간의 관계를 알아보십시오.
- 정적은 평형 상태의 힘에 대한 연구입니다.
- 평형을 이루려면 두 가지 조건이 충족되어야 하며,이는 선형 또는 회전 가속도가 없는 운동으로 정의된다.
- 평형을 이루기 위해 필요한 첫 번째 조건은 시스템의 순 외력이 0 이어야한다는 것입니다.
개념적 질문
1: 동적 평형 상태에있는 움직이는 몸의 속도에 대해 무엇을 말할 수 있습니까? 신체의 모든 외부 힘을 나타 내기 위해 명확하게 표시된 화살표를 사용하여 그러한 신체의 스케치를 그립니다.
2: 어떤 조건에서 회전하는 몸이 평형 상태에있을 수 있습니까? 예를 들어 보자.
용어
정적 평형 시스템에 작용하는 순 외력과 토크가 0 인 평형 상태 동적 평형 일정한 속도로 움직이는 시스템의 순 외력과 토크가 0 인 평형 상태