Universiteitsfysica: OpenStax
samenvatting
- Geef de eerste evenwichtsvoorwaarde aan.
- verklaart statisch evenwicht.
- verklaart dynamisch evenwicht.
de eerste voorwaarde die nodig is om evenwicht te bereiken is de reeds genoemde: de netto externe kracht op het systeem moet nul zijn. Uitgedrukt als een vergelijking, is dit gewoon
merk op dat als net \ boldsymbol{F}nul is, dan is de netto externe kracht in elke richting nul. Bijvoorbeeld, de netto externe krachten langs de typische X-en y-assen zijn nul. Dit wordt geschreven als
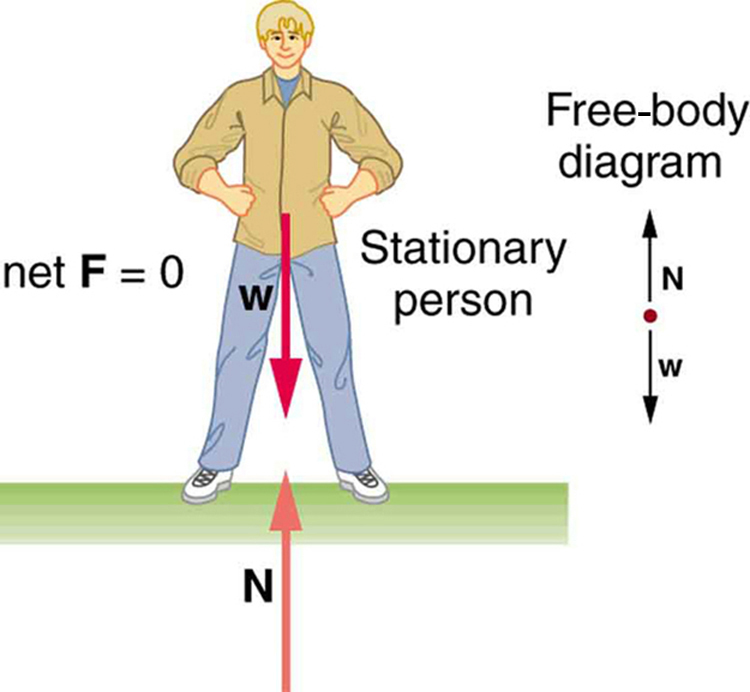
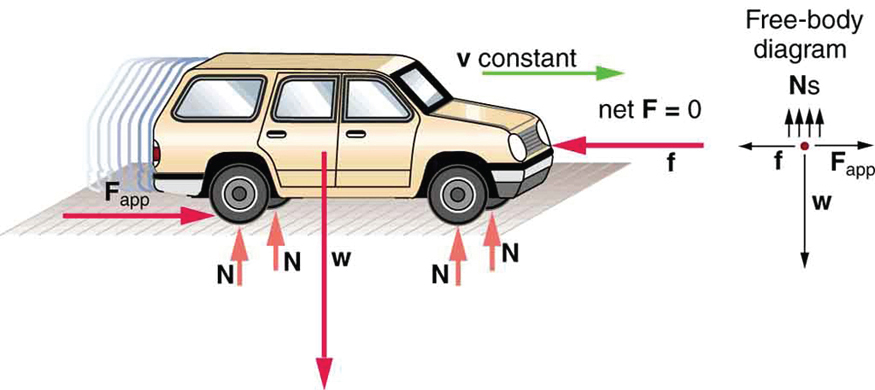
figuur 1 en Figuur 2 illustreren situaties waarin\boldsymbol{\textbf{net }F=0}zowel voor statisch evenwicht (bewegingloos) als voor dynamisch evenwicht (constante snelheid).
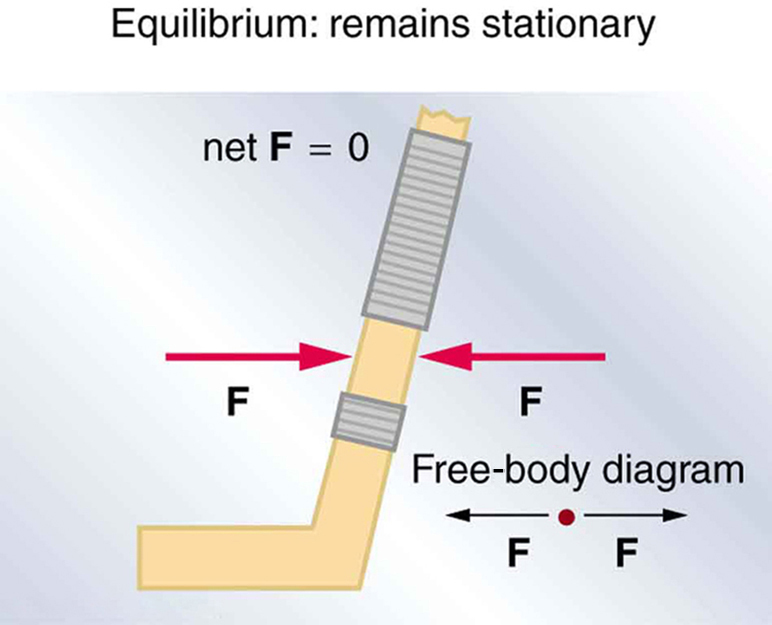
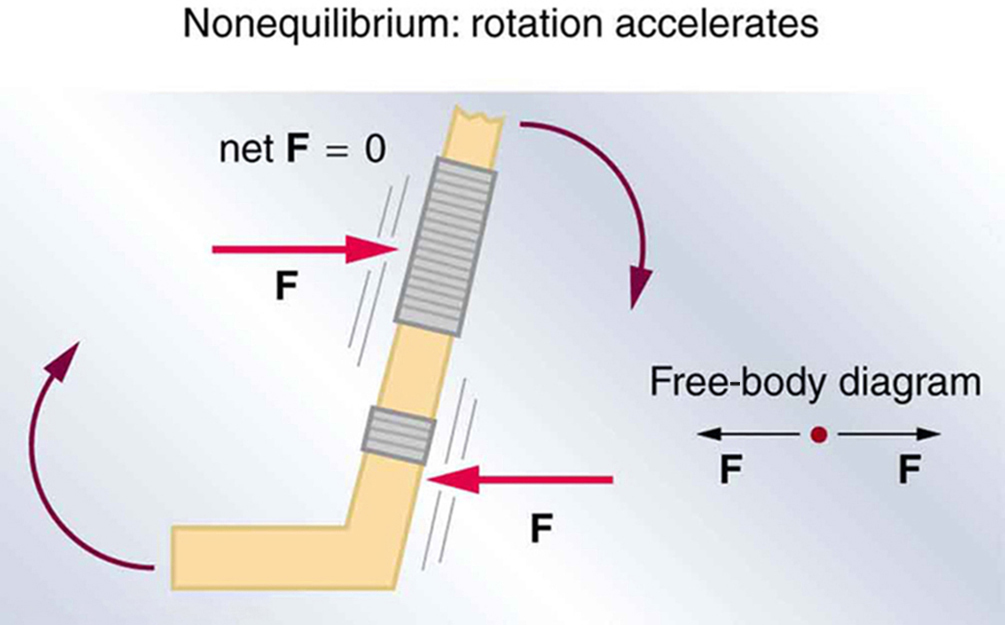
het is echter niet voldoende dat de netto externe kracht van een systeem nul is om een systeem in evenwicht te houden. Denk aan de twee situaties die in Figuur 3 en Figuur 4 worden geïllustreerd waar krachten worden uitgeoefend op een ijshockeystick die plat op ijs ligt. De netto externe kracht is nul in beide situaties weergegeven in de figuur; maar in het ene geval wordt evenwicht bereikt, terwijl in het andere niet. In Figuur 3 blijft de ijshockeystick onbeweeglijk. Maar in Figuur 4, met dezelfde krachten toegepast op verschillende plaatsen, de stok ervaart versnelde rotatie. Daarom weten we dat het punt waarop een kracht wordt uitgeoefend een andere factor is om te bepalen of evenwicht al dan niet wordt bereikt. Dit zal verder worden onderzocht in het volgende hoofdstuk.
PHET EXPLORATIONS: koppel
onderzoek hoe koppel een object doet roteren. Ontdek de relaties tussen Hoekversnelling, Traagheidsmoment, impulsmoment en koppel.
- statica is de studie van krachten in evenwicht.
- aan twee voorwaarden moet worden voldaan om een evenwicht te bereiken, dat wordt gedefinieerd als beweging zonder lineaire of rotatieversnelling.
- de eerste voorwaarde voor het bereiken van evenwicht is dat de netto externe kracht op het systeem nul moet zijn, zodat\boldsymbol{\textbf{net }F=0}.
conceptuele vragen
1: Wat kun je zeggen over de snelheid van een bewegend lichaam dat zich in dynamisch evenwicht bevindt? Teken een schets van zo ‘ n lichaam met duidelijk geëtiketteerde pijlen om alle externe krachten op het lichaam weer te geven.
2: onder welke omstandigheden kan een roterend lichaam in evenwicht zijn? Geef een voorbeeld.
verklarende woordenlijst
statisch evenwicht een evenwichtstoestand waarin de netto externe kracht en het nettokoppel die op een systeem werken gelijk zijn aan nul dynamisch evenwicht een evenwichtstoestand waarin de netto externe kracht en het nettokoppel op een systeem dat met constante snelheid beweegt gelijk zijn aan nul