College Physics: OpenStax
Yhteenveto
- ilmoitetaan ensimmäinen tasapainotila.
- selitä staattinen tasapaino.
- selitä dynaaminen tasapaino.
ensimmäinen edellytys tasapainon saavuttamiseksi on jo mainittu: ulkoisen nettovoiman systeemiin on oltava nolla. Yhtälönä ilmaistuna tämä on yksinkertaisesti
huomaa, että jos netto\boldsymbol{F}on nolla, niin netto ulkoinen voima mihin tahansa suuntaan on nolla. Esimerkiksi tyypillisten x-ja y-akselien suuntaiset ulkoiset nettovoimat ovat nolla. Tämä kirjoitetaan muodossa
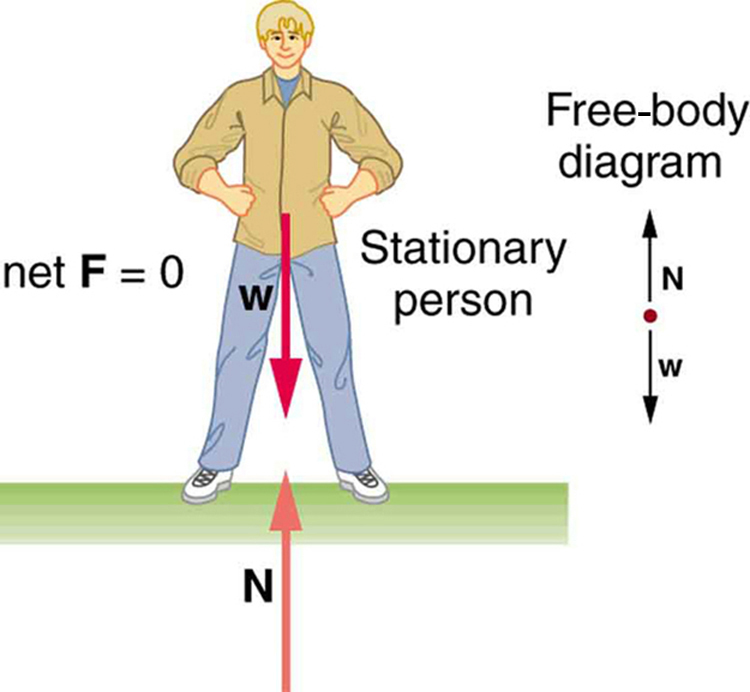
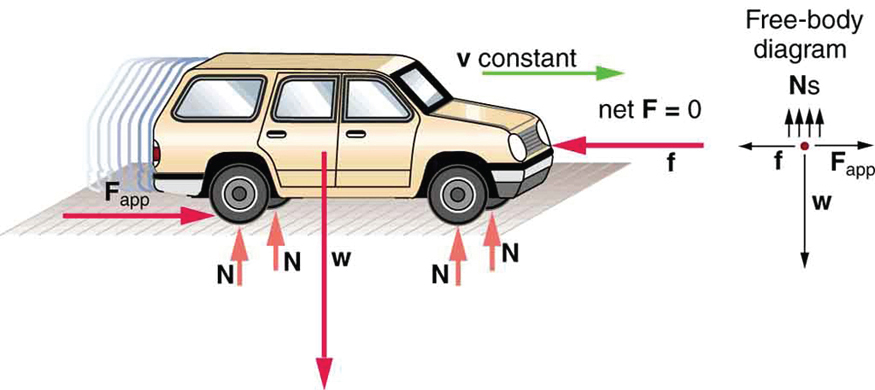
Kuva 1 ja kuva 2 kuvaavat tilanteita, joissa\boldsymbol{\textbf{net }F = 0}sekä staattisen tasapainon (liikkumattoman) että dynaamisen tasapainon (Vakionopeuden) osalta.
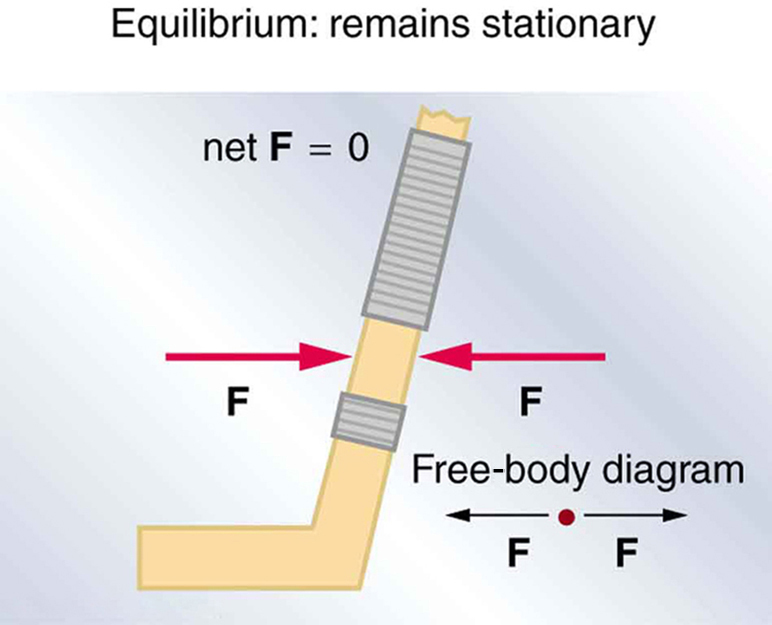
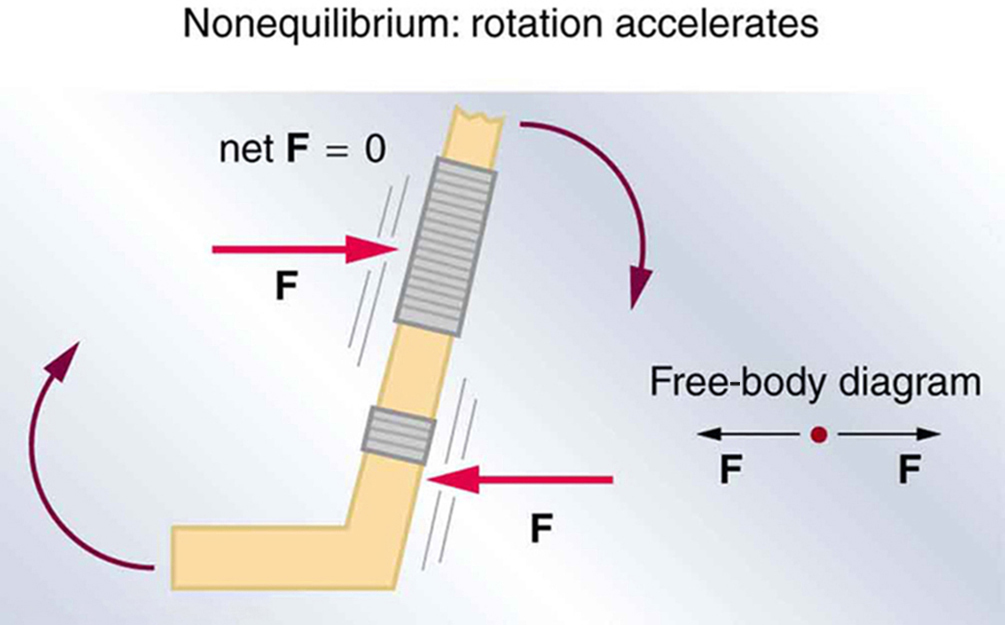
ei kuitenkaan riitä, että systeemin ulkoinen nettovoima on nolla, jotta systeemi olisi tasapainossa. Tarkastellaanpa kuvioissa 3 ja 4 kuvattuja kahta tilannetta, joissa voima kohdistuu jääkiekkomailaan, joka makaa tasaisena jäällä. Ulkoinen nettovoima on nolla molemmissa kuviossa esitetyissä tilanteissa, mutta toisessa tapauksessa saavutetaan tasapaino, kun taas toisessa ei. Kuvassa 3 jääkiekkomaila pysyy liikkumattomana. Mutta kuvassa 4, samoilla voimilla eri paikoissa, keppi kokee nopeutetun pyörimisen. Siksi tiedämme, että kohta, jossa voima on sovellettu on toinen tekijä määritettäessä, onko tasapaino on saavutettu. Tätä tarkastellaan tarkemmin seuraavassa jaksossa.
PHET-tutkimukset: vääntömomentti
tutkitaan, miten vääntömomentti saa kappaleen pyörimään. Tutustu kulmakiihtyvyyden, hitausmomentin, kulmamomentin ja vääntömomentin välisiin suhteisiin.
- Statiikka on tasapainovoimien tutkimus.
- tasapainon saavuttamiseksi on täytettävä kaksi ehtoa, jotka on määritelty liikkeeksi ilman lineaarista tai pyörimiskiihtyvyyttä.
- ensimmäinen edellytys tasapainon saavuttamiseksi on, että systeemiin kohdistuvan ulkoisen nettovoiman on oltava nolla, joten\boldsymbol{\textbf{net }F=0}.
käsitteelliset kysymykset
1: Mitä voit sanoa liikkuvan kappaleen nopeudesta, joka on dynaamisessa tasapainossa? Piirrä luonnos tällaisesta kehosta käyttäen selvästi merkittyjä nuolia edustamaan kaikkia kehon ulkoisia voimia.
2: millaisissa olosuhteissa pyörivä kappale voi olla tasapainossa? Kerro esimerkki.
Sanasto
staattinen tasapaino tasapainotila, jossa järjestelmään vaikuttava ulkoinen nettovoima ja vääntömomentti on nolla dynaaminen tasapaino tasapainotila, jossa ulkoinen nettovoima ja vääntömomentti vakionopeudella liikkuvassa järjestelmässä ovat nolla