Fizyka College’ u: OpenStax
podsumowanie
- podaj pierwszy warunek równowagi.
- wyjaśnij równowagę statyczną.
- wyjaśnij równowagę dynamiczną.
pierwszym warunkiem koniecznym do osiągnięcia równowagi jest wspomniany już warunek: siła zewnętrzna netto na układ musi wynosić zero. Wyrażone jako równanie, jest to po prostu
zauważ, że jeśli net\boldsymbol{F}jest równy zero, to siła zewnętrzna netto w dowolnym kierunku jest równa zero. Na przykład siły zewnętrzne netto wzdłuż typowych osi x i y wynoszą zero. Jest to zapisane jako
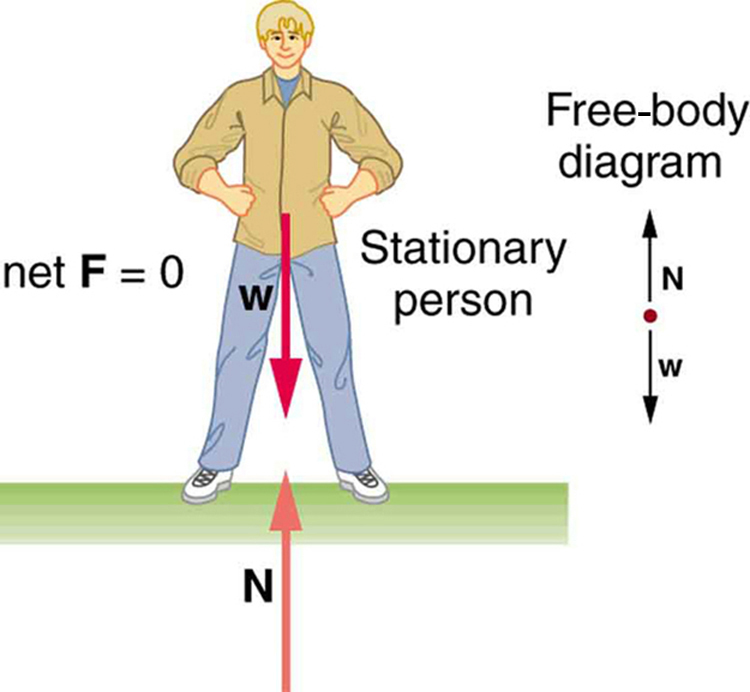
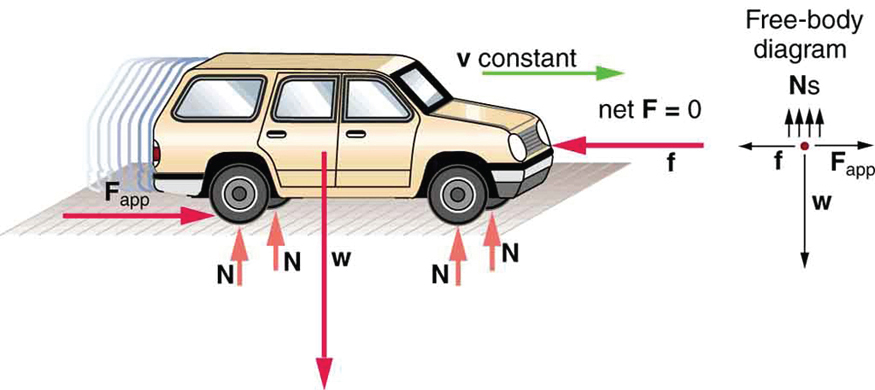
Rysunek 1 i rysunek 2 ilustrują sytuacje, w których\boldsymbol{\textbf{net }F=0}dla równowagi statycznej (nieruchomej) i równowagi dynamicznej (stałej prędkości).
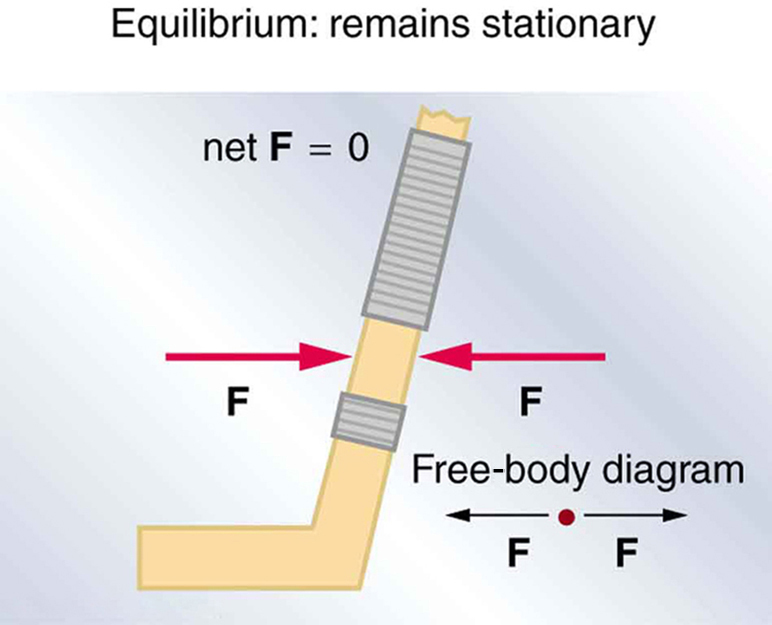
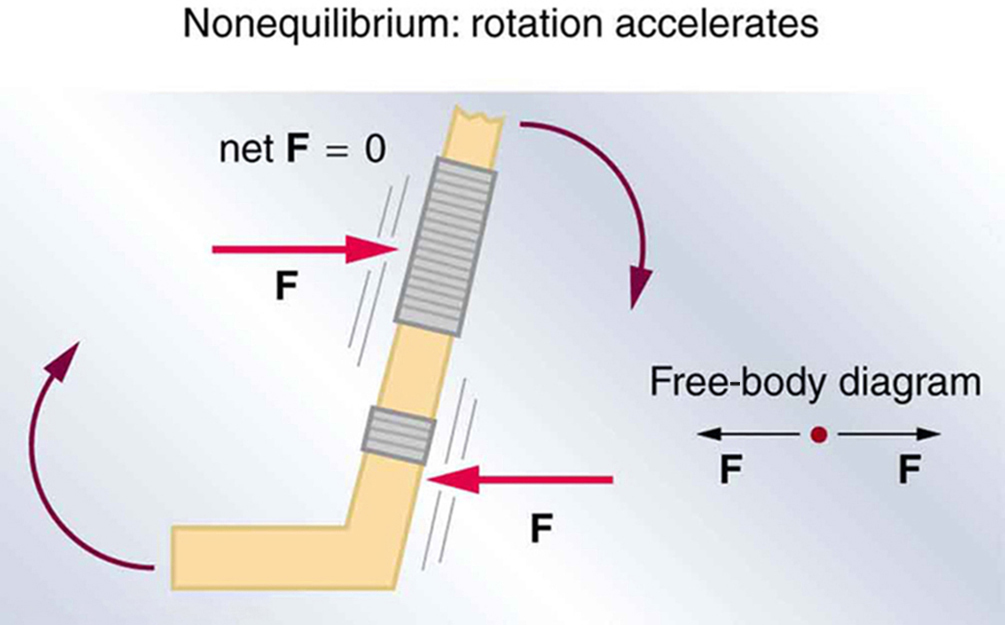
jednak nie jest wystarczające, aby siła zewnętrzna netto układu była zerowa, aby układ był w równowadze. Rozważmy dwie sytuacje przedstawione na fig. 3 i Fig. 4, w których siły są przykładane do leżącego płasko na lodzie kija hokejowego. Siła zewnętrzna netto jest zerowa w obu sytuacjach pokazanych na rysunku; ale w jednym przypadku równowaga jest osiągana, podczas gdy w drugim nie jest. Na rysunku 3 kij hokejowy pozostaje nieruchomy. Ale na rysunku 4, przy tych samych siłach przyłożonych w różnych miejscach, kij doświadcza przyspieszonego obrotu. Dlatego wiemy, że punkt, w którym przyłożona jest siła, jest kolejnym czynnikiem decydującym o osiągnięciu równowagi. Zostanie to omówione w dalszej części.
PHET EXPLORATIONS: TORQUE
zbadaj, w jaki sposób moment obrotowy powoduje obrót obiektu. Poznaj zależności między przyspieszeniem kątowym, momentem bezwładności, momentem pędu i momentem obrotowym.
- statyka jest badanie sił w równowadze.
- dla osiągnięcia równowagi muszą być spełnione dwa warunki, które definiuje się jako ruch bez przyspieszenia liniowego lub obrotowego.
- pierwszym warunkiem koniecznym do osiągnięcia równowagi jest to, że siła zewnętrzna netto układu musi wynosić zero, tak więc\boldsymbol{\textbf{net }F=0}.
pytania koncepcyjne
1: Co można powiedzieć o prędkości poruszającego się ciała, które jest w dynamicznej równowadze? Narysuj szkic takiego ciała za pomocą wyraźnie oznaczonych strzałek, aby reprezentować wszystkie siły zewnętrzne na ciele.
2: w jakich warunkach ciało obrotowe może być w równowadze? Podaj przykład.
Słowniczek
równowaga statyczna stan równowagi, w którym zewnętrzna siła netto i moment obrotowy działające na układ jest zerowa równowaga dynamiczna stan równowagi, w którym zewnętrzna siła netto i moment obrotowy działające na układ poruszający się ze stałą prędkością są zerowe