wykresy komputerowe
Backpropagation jest zaimplementowany w frameworkach deep learning takich jak TensorFlow, Torch, Theano itp., za pomocą wykresów obliczeniowych. Co ważniejsze, zrozumienie propagacji wstecznej na wykresach obliczeniowych łączy kilka różnych algorytmów i ich odmian, takich jak backprop przez czas i backprop ze wspólnymi wagami. Gdy wszystko jest konwertowane na wykres obliczeniowy, są one nadal ten sam algorytm – tylko z powrotem propagacji na wykresach obliczeniowych.
Co to jest Graf obliczeniowy
Graf obliczeniowy jest zdefiniowany jako Graf kierowany, w którym węzły odpowiadają operacjom matematycznym. Wykresy obliczeniowe są sposobem wyrażania i oceny wyrażenia matematycznego.
na przykład, oto proste równanie matematyczne −
$$p = x+y$$
możemy narysować wykres obliczeniowy powyższego równania w następujący sposób.
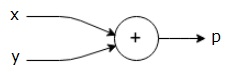
powyższy wykres obliczeniowy ma dodatkowy węzeł (węzeł ze znakiem”+”) z dwiema wejściowymi zmiennymi x i y oraz jedną wyjściową q.
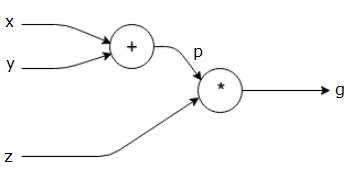
weźmy inny przykład, nieco bardziej złożony. Mamy następujące równanie.
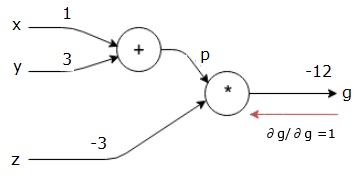
$ $ g = \ left (x+y \right ) \ast z $$
powyższe równanie jest reprezentowane przez następujący wykres obliczeniowy.
wykresy obliczeniowe i Backpropagacja
wykresy obliczeniowe i backpropagacja, oba są ważnymi podstawowymi pojęciami w głębokim uczeniu do szkolenia sieci neuronowych.
Forward Pass
Forward pass to procedura oceny wartości wyrażenia matematycznego reprezentowanego przez wykresy obliczeniowe. Wykonanie forward pass oznacza, że przekazujemy wartość ze zmiennych w kierunku do przodu od lewej (wejście) do prawej, gdzie jest wyjście.
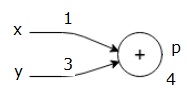
rozważmy przykład podając pewną wartość wszystkim wejściom. Załóżmy, że następujące wartości są podane dla wszystkich wejść.
$$x=1, y=3, z=-3$$
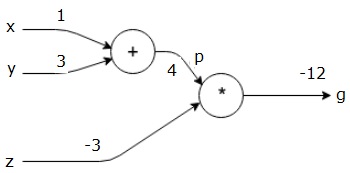
podając te wartości wejściom, możemy wykonać forward pass i uzyskać następujące wartości dla wyjść na każdym węźle.
najpierw używamy wartości x = 1 i y = 3, aby uzyskać p = 4.
następnie używamy p = 4 i z = -3, aby uzyskać g = -12. Idziemy od lewej do prawej, do przodu.
cele przejścia do tyłu
w przejściu do tyłu naszym zamiarem jest obliczenie gradientów dla każdego wejścia w odniesieniu do końcowego wyjścia. Te gradienty są niezbędne do szkolenia sieci neuronowej z wykorzystaniem gradientu zniżania.
na przykład pragniemy następujących gradientów.
pożądane gradienty
$$\frac{\partial x}{\partial f}, \frac{\partial y}{\partial f}, \frac{\partial z}{\partial f}$$
Backward pass (backpropagation)
rozpoczynamy backward pass od znalezienia pochodnej końcowego wyniku względem końcowego wyniku (samego!). W ten sposób spowoduje to wyprowadzenie tożsamości, a wartość jest równa 1.
$$ \ frac {\partial g} {\partial g} = 1$$
nasz wykres obliczeniowy wygląda teraz tak, jak pokazano poniżej –
następnie wykonamy backward pass poprzez operację”*”. Obliczymy gradienty w p i z. Ponieważ g = p*z, wiemy, że−
$$\frac {\partial g} {\partial z} = p$$
$$\frac {\partial g} {\partial p} = z$$
znamy już wartości z I p z przejścia do przodu. Stąd otrzymujemy−
$$\frac {\partial g} {\partial z} = p = 4$$
i
$$ \ frac {\partial g} {\partial p} = z = -3$$
chcemy obliczyć gradienty w X i y−
$$\frac {\partial g} {\partial x},\frac {\partial g} {\partial y}$$
jednak chcemy to zrobić efektywnie (chociaż x i g są tylko dwa skoki od siebie na tym wykresie, wyobraź sobie, że są naprawdę daleko od siebie). Aby efektywnie obliczyć te wartości, użyjemy łańcuchowej reguły różnicowania. Z reguły łańcuchowej mamy−
$$\frac {\partial g} {\partial x}= \ frac {\partial g} {\partial P} \ ast \frac {\partial p} {\partial x}$$
$$\frac {\partial g} {\partial y}=\frac{\partial g} {\partial p} \ast\frac{\partial p} {\partial y}$$
ale wiemy już, że dg / dp = -3, dp / dx i dp / dy są łatwe, ponieważ p zależy bezpośrednio od x i y. Mamy –
$$p = x + y\Rightarrow \frac {\partial x} {\partial p} = 1, \frac {\partial y} {\partial p} = 1$$
stąd otrzymujemy−
$$\frac {\partial g} {\partial f} = \ frac {\partial g} {\partial P} \ ast \frac {\partial p} {\partial x} = \ left (-3 \right).1 = -3$$
dodatkowo dla wejścia y−
$$\frac {\partial g} {\partial y} = \ frac {\partial g} {\partial P} \ ast \frac {\partial p} {\partial y} = \ left (-3 \right).1 = -3$$
głównym powodem zrobienia tego wstecz jest to, że kiedy musieliśmy obliczyć gradient w X, użyliśmy tylko już obliczonych wartości i dq / dx (pochodna wyjścia węzła w odniesieniu do tego samego wejścia węzła). Użyliśmy lokalnych informacji do obliczenia globalnej wartości.
kroki treningu sieci neuronowej
wykonaj następujące kroki, aby trenować sieć neuronową−
-
dla punktu danych x w zbiorze danych wykonujemy przekazanie do przodu Z X jako wejściem i obliczamy koszt c jako wyjście.
-
przechodzimy wstecz zaczynając od c i obliczamy gradienty dla wszystkich węzłów na wykresie. Obejmuje to węzły, które reprezentują wagi sieci neuronowej.
-
następnie aktualizujemy wagi, wykonując gradienty W = w-learning rate *.
-
powtarzamy ten proces aż do spełnienia kryteriów stop.